Ви не увійшли.
- Теми: Активні | Без відповіді
#1 2019-03-18 15:04:38
- mitonn
- Учасник

- Зареєстрований: 2019-03-01
- Повідомлень: 25
Радиоуправление на NRF24L01
Всем доброго дня!
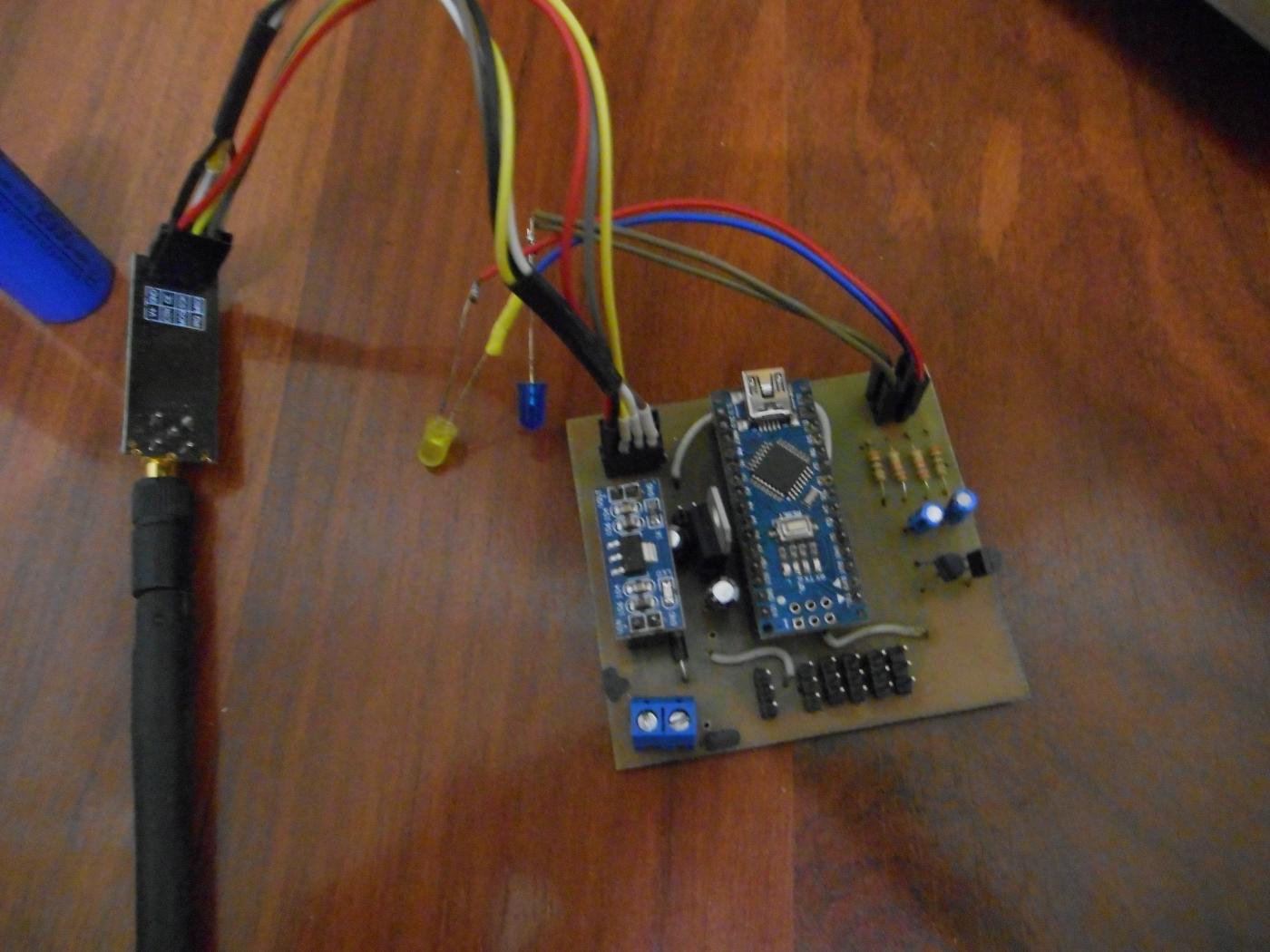
При изготовлении радиоуправления столкнулся с одной проблемой которую не удается победить в полном объеме. Р/у выполнено на базе arduino nano с использованием NRF24L01. Управляет данное р/у одним бесколлекторным двигателем и тремя сервомашинками.
Двигатель и одна серва управляются плавно с потенциометра (переменный резистор или джойстик), а две сервы с кнопок - 0-180.
Все работает ,но есть один (как для меня) большой недостаток!!! при пропадании сигнала с передатчика, приемник отрабатывает последнее полученное значение.Функции библиотек проблему не решают (или я не умею ими пользоваться правильно). Р/у управляет закормочным корабликом. Кому интересно могу поделиться схемами и реализацией в "железо". Буду рад если кто подскажет что поменять в скетче.Буду рад всем кто примет участие в обсуждении. ![]()
Неактивний
#3 2019-03-18 15:31:18
- mitonn
- Учасник
- Зареєстрований: 2019-03-01
- Повідомлень: 25
Re: Радиоуправление на NRF24L01
Если выключить передатчик (отошло питание,модель вышла из зоны "видимости" и тд) то на приемнике остаются последние полученные значения. Кораблик продолжит движение пока не сядет аккумулятор ![]() ,реально такого еще не случалось, но вероятность есть.
,реально такого еще не случалось, но вероятность есть.
Неактивний
#4 2019-03-18 16:21:56
- Kino
- Учасник
- Зареєстрований: 2019-02-28
- Повідомлень: 127
Re: Радиоуправление на NRF24L01
Подсказываю. В пакете передатчика заводим переменную, постоянно инкрементируемая при каждой посылке. Передатчик при этом должен передавать постоянно. Приемником анализируйте в пакете этот байт. Если он, на протяжении какого-то времени сохраняет последнее значение, то соответственно связь потеряна и выключаем моторы и сервы.
Вариант второй. Просто после получения посылки обнуляйте массив и там не будет старых значений )). Но тут вопрос в потери реакции на команды, возможны пропуски.
Остання редакція Kino (2019-03-18 16:23:23)
Неактивний
#5 2019-03-18 20:40:08
- mitonn
- Учасник
- Зареєстрований: 2019-03-01
- Повідомлень: 25
Re: Радиоуправление на NRF24L01
"Вариант второй. Просто после получения посылки обнуляйте массив и там не будет старых значений )). Но тут вопрос в потери реакции на команды, возможны пропуски."
Этот вариан уже опробован, из-за пропусков двигатель работает с поддергиванием, а по первому возможно. Попробую - отпишусь. Спасибо!
Неактивний
#6 2019-05-17 10:56:16
- mitonn
- Учасник
- Зареєстрований: 2019-03-01
- Повідомлень: 25
Re: Радиоуправление на NRF24L01
Наконец решил написать о решении своей проблемы при потере сигнала приемником.Удалось ее решить при помощи функции "millis",которая при пропадании сигнала больше чем на 500 миллисекунд исполняет команду "motor.write(0)" ,а при появлении сигнала с передатчика продолжает исполнять его команды.В живую это решено так:
#include <SPI.h>
#include "nRF24L01.h"
#include "RF24.h"
#include <Servo.h>
Servo servo1;
Servo servo2;
Servo servo3;
Servo motor;
RF24 radio(9, 10); // "создать" модуль на пинах 9 и 10 Для Уно
//RF24 radio(9,53); // для Меги
byte address[][6] = {"1Node","2Node","3Node","4Node","5Node","6Node"}; //возможные номера труб
int servo1_pos = 0;
int timeout = 500;
int lastTime = 0;
byte recieved_data[4];
void setup(){
servo1.attach(2);
servo2.attach(4);
servo3.attach(3);
motor.attach(5);
Serial.begin(9600); //открываем порт для связи с ПК
radio.begin(); //активировать модуль
radio.setAutoAck(1); //режим подтверждения приёма, 1 вкл 0 выкл
radio.setRetries(0, 15); //(время между попыткой достучаться, число попыток)
radio.enableAckPayload(); //разрешить отсылку данных в ответ на входящий сигнал
radio.setPayloadSize(32); //размер пакета, в байтах
radio.openReadingPipe(1, address[0]); //хотим слушать трубу 0
radio.setChannel(0x71); //выбираем канал (в котором нет шумов!)
radio.setPALevel (RF24_PA_MAX); //уровень мощности передатчика. На выбор RF24_PA_MIN, RF24_PA_LOW, RF24_PA_HIGH, RF24_PA_MAX
radio.setDataRate (RF24_250KBPS); //скорость обмена. На выбор RF24_2MBPS, RF24_1MBPS, RF24_250KBPS
//должна быть одинакова на приёмнике и передатчике!
//при самой низкой скорости имеем самую высокую чувствительность и дальность!!
radio.powerUp(); //начать работу
radio.startListening(); //начинаем слушать эфир, мы приёмный модуль
}
// Serial.println(radio.available(&pipeNo));
void loop() {
byte pipeNo;
while (radio.available(&pipeNo)) { // слушаем эфир со всех труб
lastTime = millis();
radio.read( &recieved_data, sizeof(recieved_data) ); // чиатем входящий сигнал
if (recieved_data[0] == 0) {
servo1.write(180);
}
if (recieved_data[0] == 1) {
servo1.write(0);
}
if (recieved_data[3] == 0) {
servo3.write(180);
}
if (recieved_data[3] == 1) {
servo3.write(0);
}
if (recieved_data[1]) {
servo2.write(recieved_data[1]);
} else {
servo2.write(0);
}
motor.write(recieved_data[2]);
}
int dt = millis() - lastTime;
if (dt >= timeout) {
motor.write(0);
}
![]()
Неактивний
#7 2019-07-14 23:53:36
- алекс81
- Гість
Re: Радиоуправление на NRF24L01
mitonn. а скетч передатчика можешь выложить?
#8 2019-07-15 09:38:50
- mitonn
- Учасник
- Зареєстрований: 2019-03-01
- Повідомлень: 25
Re: Радиоуправление на NRF24L01
Скетч для передатчика. Позволяет управлять 1 бесколлекторным двигателем и тремя сервоприводами. 1 серво плавно с потенциометра от 0 -180 и два с кнопок 0 или поворот на 180. Управление двигателем плавное с потенциометра от 0 до max об/мин. Если есть необходимость могу рассказать о решении в "железе" ![]()
#include <SPI.h> // библиотека для работы с шиной SPI
#include "nRF24L01.h" // библиотека радиомодуля
#include "RF24.h" // ещё библиотека радиомодуля
RF24 radio(9, 10); // "создать" модуль на пинах 9 и 10 Для Уно
//RF24 radio(9,53); // для Меги
byte address[][6] = {"1Node", "2Node", "3Node", "4Node", "5Node", "6Node"}; //возможные номера труб
byte transmit_data[4];
int val;
int val2;
const int potPin = 0;
const int potPin2 = 1;
const int buttonPin = 2;
const int buttonPin2 = 3;
void setup() {
Serial.begin(9600); //открываем порт для связи с ПК
pinMode(buttonPin, INPUT_PULLUP);
pinMode(buttonPin2, INPUT_PULLUP);
pinMode(potPin, INPUT);
pinMode(potPin2, INPUT);
radio.begin(); //активировать модуль
radio.setAutoAck(1); //режим подтверждения приёма, 1 вкл 0 выкл
radio.setRetries(0, 15); //(время между попыткой достучаться, число попыток)
radio.enableAckPayload(); //разрешить отсылку данных в ответ на входящий сигнал
radio.setPayloadSize(32); //размер пакета, в байтах
radio.openWritingPipe(address[0]); //мы - труба 0, открываем канал для передачи данных
radio.setChannel(0x71); //выбираем канал (в котором нет шумов!)
radio.setPALevel (RF24_PA_MAX); //уровень мощности передатчика. На выбор RF24_PA_MIN, RF24_PA_LOW, RF24_PA_HIGH, RF24_PA_MAX
radio.setDataRate (RF24_250KBPS); //скорость обмена. На выбор RF24_2MBPS, RF24_1MBPS, RF24_250KBPS
//должна быть одинакова на приёмнике и передатчике!
//при самой низкой скорости имеем самую высокую чувствительность и дальность!!
radio.powerUp(); //начать работу
radio.stopListening(); //не слушаем радиоэфир, мы передатчик
}
void loop() {
transmit_data[0] = !digitalRead(buttonPin);
val = analogRead(potPin);
val = map(val, 0, 1023, 0, 179);
transmit_data[1] = val;
val2 = analogRead(potPin2);
val2 = map(val2, 0, 1023, 0, 179);
transmit_data[2] = val2;
radio.write(&transmit_data, sizeof(transmit_data));
transmit_data[3] = !digitalRead(buttonPin2);
// Serial.print("Sent: "); Serial.println(counter);
// radio.write(&counter, sizeof(counter));
// counter++;
// delay(10);
} ![]()
Неактивний
#9 2019-07-15 12:19:39
- алекс81
- Гість
Re: Радиоуправление на NRF24L01
огромное спасибо.
#10 2019-07-15 19:29:39
- алекс81
- Гість
Re: Радиоуправление на NRF24L01
у меня кораблик весом 3.5 кг. мотор коллекторный 540 7.6 вольт. винт 30мм. ну очень медленный где то 4км в час.какой винт нужно поставить . если есть идеи скинь сылку.
#11 2019-07-15 19:31:40
- алекс81
- Гість
Re: Радиоуправление на NRF24L01
не понимаю какие винты скоростные какие тяговые
#12 2019-07-16 10:39:38
- mitonn
- Учасник
- Зареєстрований: 2019-03-01
- Повідомлень: 25
Re: Радиоуправление на NRF24L01
quote=алекс81]у меня кораблик весом 3.5 кг. мотор коллекторный 540 7.6 вольт. винт 30мм. ну очень медленный где то 4км в час.какой винт нужно поставить . если есть идеи скинь сылку.
Мотор 540 класса достаточно мощный для такого кораблика, но нужно еще знать количество оборотов двигателя, а оно зависит от количества витков.
У меня кораблик (то-же тихоходный, но быстрее около 8-10 км/ч) весом с полной нагрузкой 5-5,5 кг. Двигатель я поставил бесколлекторный A2212/15T-930kv, при 12В дает около 11000 об/мин. Винт посадка 3мм диаметр 35мм.
Неактивний
#13 2019-07-16 12:19:53
- Вячеслав Азаров
- Учасник

- Зареєстрований: 2017-05-25
- Повідомлень: 1,732
Re: Радиоуправление на NRF24L01
не понимаю какие винты скоростные какие тяговые
У скоростных угол атаки лопастей больше.
Неактивний
#17 2019-07-17 11:26:46
- mitonn
- Учасник
- Зареєстрований: 2019-03-01
- Повідомлень: 25
Re: Радиоуправление на NRF24L01
Мотор коллекторный 540 класса имея 55 витков развивает на холостых до 16500 об/мин, прожерливый (максимальный ток до 28A). Для вашего кораблика его должно хватать. Винт желательно увеличить до 38 мм в диаметре.
Бесколлекторные двигатели имеют возможность вращения в обе стороны, но поскольку для управления используется специальный регулятор (драйвер,блок названий много) ,а недорогие обеспечивают вращение в одну сторону. Для вращения в противоположную нужно поменять местами два провода. Для катера задний ход можно обеспечить установкой 2-х канального модуля реле 5В 10А .
Источник https://arduino.ua/prod201-2-h-kanalnii-modyl-rele-5v-10a-s-optorazvyazkoi
Для меня задний ход не критичен, но мысли есть. Или купить более дорогой с реверсом. Читал о том что можно "научить" реверсу и простой регулятор, но сам не пробовал.
Винты можно посмотреть:https://hobbymania.com.ua/ru/catalog_boat.php?
Неактивний
#19 2019-07-24 23:28:46
- алекс81
- Учасник
- Зареєстрований: 2019-07-15
- Повідомлень: 6
Re: Радиоуправление на NRF24L01
Всем доброго дня!
При изготовлении радиоуправления столкнулся с одной проблемой которую не удается победить в полном объеме. Р/у выполнено на базе arduino nano с использованием NRF24L01. Управляет данное р/у одним бесколлекторным двигателем и тремя сервомашинками.
Двигатель и одна серва управляются плавно с потенциометра (переменный резистор или джойстик), а две сервы с кнопок - 0-180.
Все работает ,но есть один (как для меня) большой недостаток!!! при пропадании сигнала с передатчика, приемник отрабатывает последнее полученное значение.Функции библиотек проблему не решают (или я не умею ими пользоваться правильно). Р/у управляет закормочным корабликом. Кому интересно могу поделиться схемами и реализацией в "железо". Буду рад если кто подскажет что поменять в скетче.Буду рад всем кто примет участие в обсуждении.
привет.если можно дай схему подключения и по возможности фото корабля. очень интересно глянуть.
Неактивний
#20 2019-07-25 22:34:38
- mitonn
- Учасник
- Зареєстрований: 2019-03-01
- Повідомлень: 25
Re: Радиоуправление на NRF24L01
привет.если можно дай схему подключения и по возможности фото корабля. очень интересно глянуть.
К сожалению схем у меня нет, есть отдельные зарисовки. Завтра сделаю что-то приличное тогда выложу.
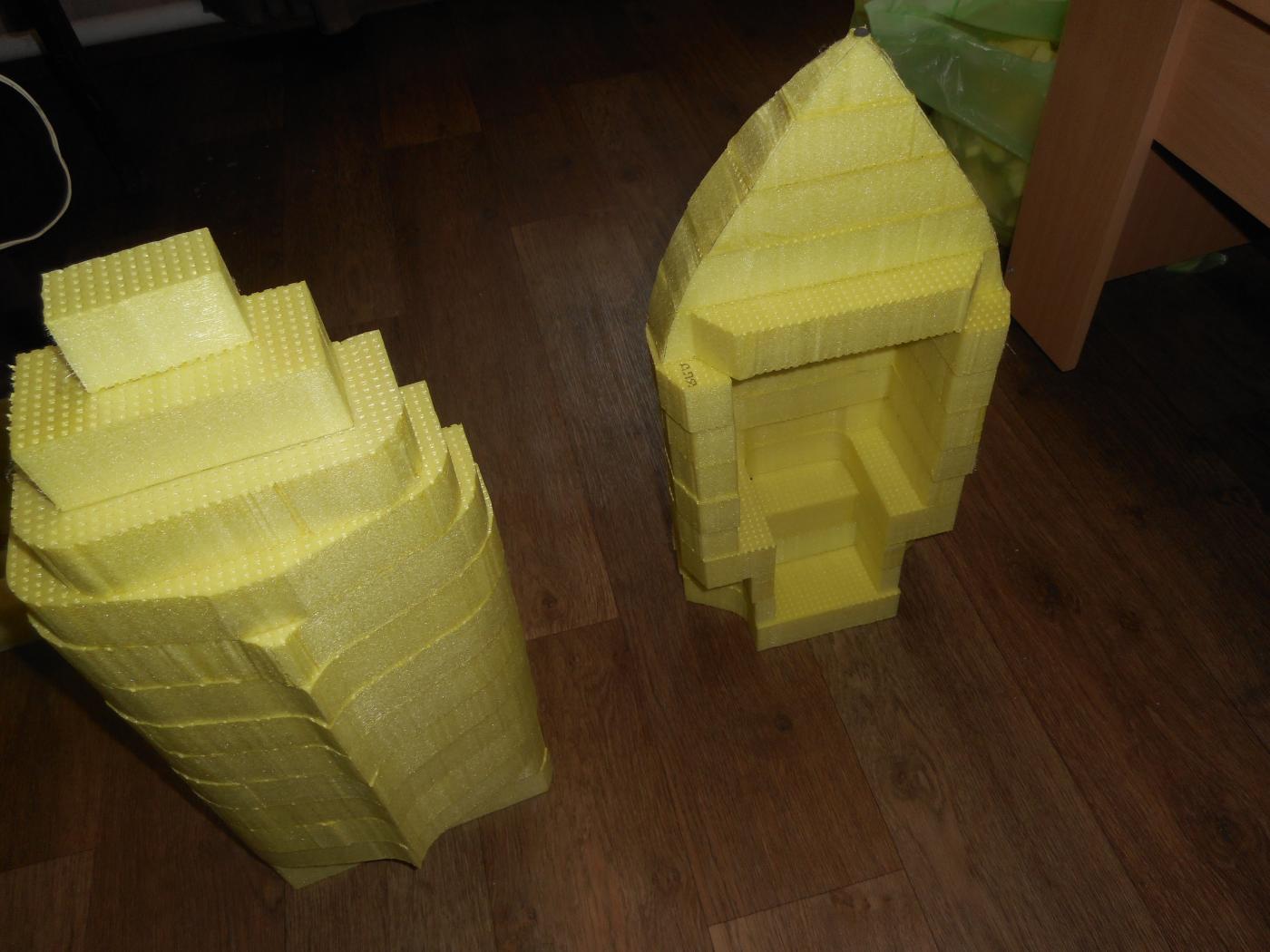
По фото кораблика ![]() .Зимой я начал изготавливать 3 кораблика, два из них я сделал и они у друзей, а свой еще доделываю.Сделал несколько фото (не судите строго).
.Зимой я начал изготавливать 3 кораблика, два из них я сделал и они у друзей, а свой еще доделываю.Сделал несколько фото (не судите строго).
Начало:



Остання редакція mitonn (2019-07-25 22:50:25)
Неактивний





#23 2019-07-26 11:58:28
- mitonn
- Учасник
- Зареєстрований: 2019-03-01
- Повідомлень: 25
Re: Радиоуправление на NRF24L01
Выкладываю схему передатчика плюс рисунок печатной платы.На печатной плате на перспектиу заложена возможность подключения еще двух кнопок или тумблеров.Печатная плата сделана в проге Sprint-Layout 5.Если нужно выложу в оригинале Приемник выложу после выходных,нет вретени сейчас.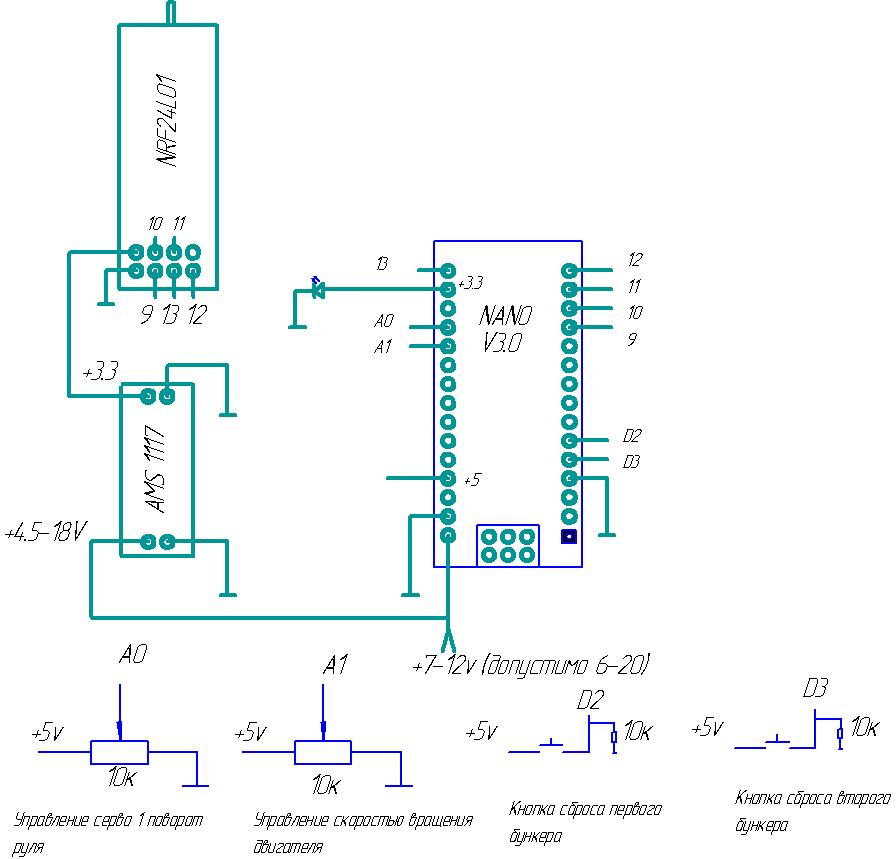
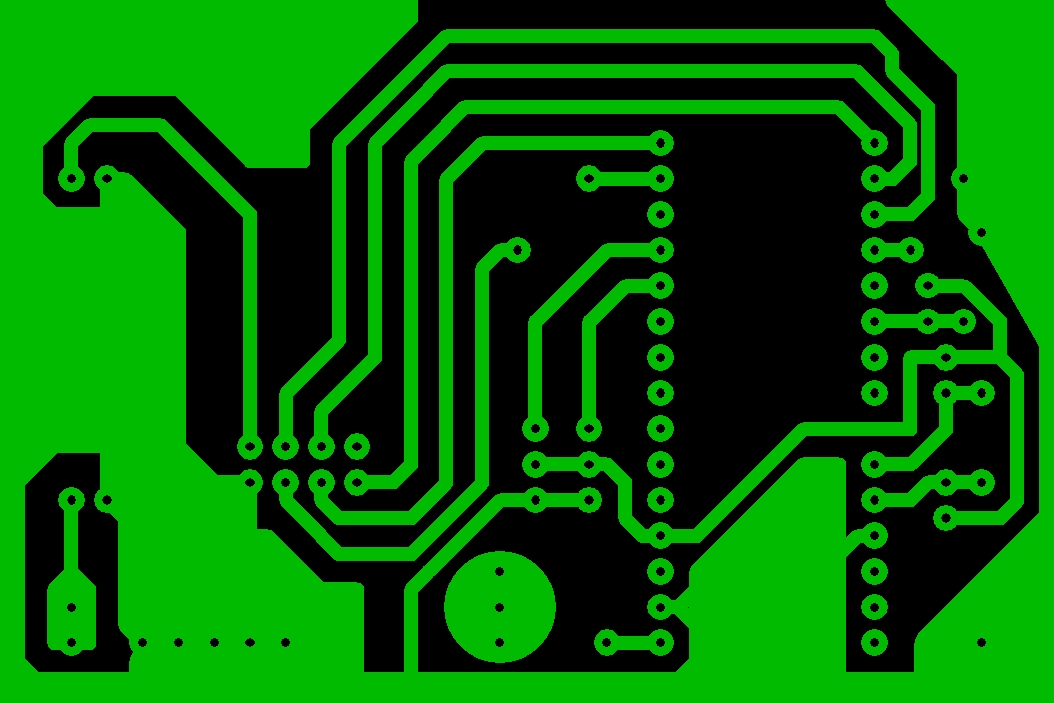
Остання редакція mitonn (2019-07-26 12:01:39)
Неактивний