Ви не увійшли.
- Теми: Активні | Без відповіді
#1 2026-04-24 12:18:48
- 3611621
- Учасник

- Зареєстрований: 2026-04-24
- Повідомлень: 7
скетч, що керує електродвигуном із зворотним зв’язком
Потрібно написати скетч і налаштувати обладнання
Завдання: Написати повний робочий скетч і налаштувати обладнання, для Arduino UNO, що керує електродвигуном із зворотним зв’язком через енкодер.
ЛОГІКА РОБОТИ:
1. Задається цільова швидкість електродвигуна
2. Енкодер на валу двигуна підраховує кількість імпульсів за заданий інтервал часу.
3. За даними енкодера розраховується поточна швидкість обертання двигуна.
4. ПІД-регулятор порівнює поточну швидкість двигуна з цільовою і обчислює керуючий вплив.
5. ШІМ-сигнал подається на драйвер двигуна для регулювання швидкості.
6. Значення відображаються на LCD 2004:
7. Усі дані записуються на карту пам'яті
Неактивний
#2 2026-04-24 14:39:25
- jokeer
- Гість
Re: скетч, що керує електродвигуном із зворотним зв’язком
Виглядає логічно. Декомпозиція на підзадачі виконана, апаратне забезпечення підібране. В чому питання? ![]() Пора здавати курсову роботу?
Пора здавати курсову роботу?
#4 2026-04-24 16:01:33
- jokeer
- Гість
Re: скетч, що керує електродвигуном із зворотним зв’язком
Допомогти - це пару абзаців тексту. Ок. Що не виходить конкретно?
#5 2026-04-26 21:17:34
- 3611621
- Учасник
- Зареєстрований: 2026-04-24
- Повідомлень: 7
Re: скетч, що керує електродвигуном із зворотним зв’язком
Поки що я зупинився на тому, що енкодер неправильно підраховує оберти.
Якщо відома кількість імпульсів N і кількість імпульсів на один оберт PPR: Оберти = N/PPR
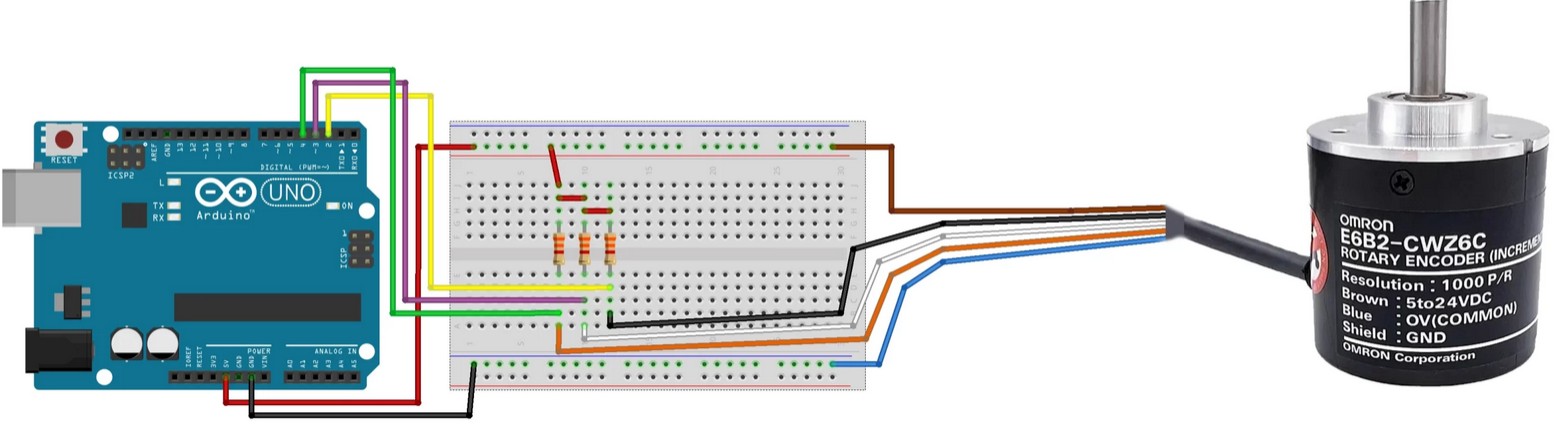
На енкодері вказано Resolution 10P/R, а насправді це генератор випадкових чисел.
Тобто на один механічний оберт вала енкодера Omron E6B2-CWZ6C щоразу видає нове значення.
Виходи Чорний (Канал A) і Білий (Канал B) підключені через зовнішній pull-up резистор 10 кОм до +5V
Остання редакція 3611621 (2026-04-26 21:47:56)
Неактивний
#6 2026-04-26 22:16:09
- jokeR
- Учасник
- Зареєстрований: 2024-12-12
- Повідомлень: 200
Re: скетч, що керує електродвигуном із зворотним зв’язком
У тих хто використовує богопротивний Fritzing в пеклі буде окремий котел, з bredboard ом ![]()
Бібліотек для енкодера в інтернеті значно більше ніж 1. Ви взяли готову чи пиляєте щось своє?
Неактивний
#7 2026-04-27 00:14:06
- dimich
- Учасник

- Зареєстрований: 2023-12-01
- Повідомлень: 835
Re: скетч, що керує електродвигуном із зворотним зв’язком
2. Енкодер на валу двигуна підраховує кількість імпульсів за заданий інтервал часу.
Який діапазон швидкостей обертання?
на один механічний оберт вала енкодера Omron E6B2-CWZ6C щоразу видає нове значення.
Енкодер не видає значення, енкодер видає сигнали. Як ви їх обробляєте?
Неактивний
#8 2026-04-27 12:08:13
- 3611621
- Учасник
- Зареєстрований: 2026-04-24
- Повідомлень: 7
Re: скетч, що керує електродвигуном із зворотним зв’язком
1. Користуюся готовими бібліотеками. + gpt + cloud + gemini + copilot
2. Швидкість обертання вала 30–300 об/хв
3. Отримані сигнали використовую для обчислення швидкості обертання вала.
Неактивний
#10 2026-04-27 14:35:49
- jokeR
- Учасник
- Зареєстрований: 2024-12-12
- Повідомлень: 200
Re: скетч, що керує електродвигуном із зворотним зв’язком
Хм ![]()
Користуюся готовими бібліотеками. + gpt + cloud + gemini + copilot
Ну, допустим ок
Швидкість обертання вала 30–300 об/хв
Ок.
Отримані сигнали використовую для обчислення швидкості обертання вала.
Ок.
То в чому питання? Ви ж не вважаєте що якісь анонімуси телепатичним способом вгадають що там чатік вам накодив?
Неактивний
#11 2026-04-27 20:53:23
- dimich
- Учасник
- Зареєстрований: 2023-12-01
- Повідомлень: 835
Re: скетч, що керує електродвигуном із зворотним зв’язком
https://forum.arduino.ua/img/members/3885/Omron-E6B2_CWZ6C.zip
В цій імплементації зміна стану відбувається лише по одному фронту однієї фази. Такий метод в більшості випадків нормально працює при постійному обертанні вала. Але на граничних умовах - наприклад, покачування вала в обидва боки - будуть хибні спрацювання.
Повноцінний конечний автомат квадратурного енкодера виглядає десь так: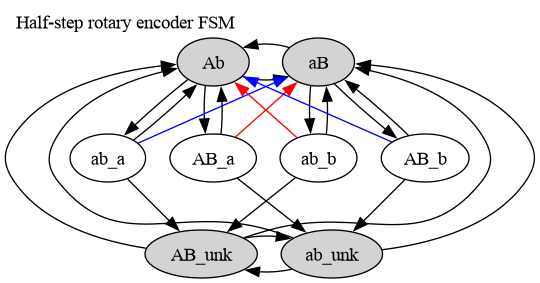
що досить просто реалізується за допомогою таблиці переходів.
Неактивний
#12 2026-04-27 22:35:23
- jokeR
- Учасник
- Зареєстрований: 2024-12-12
- Повідомлень: 200
Re: скетч, що керує електродвигуном із зворотним зв’язком
Ну, так собі рішення. Але в архіві є сцилка на статтю на хабрі де все досить добре розжоване. До речі на високих обертах доведеться застосовувати тактоложество, а 2000 обертів у автора atmega не потягнула.
Неактивний
#13 2026-04-27 23:11:47
- dimich
- Учасник
- Зареєстрований: 2023-12-01
- Повідомлень: 835
Re: скетч, що керує електродвигуном із зворотним зв’язком
а 2000 обертів у автора atmega не потягнула.
Не дивно, з енкодером на 2000 PPR. Якщо іншого нема, а треба оберти в секунду при обертанні в один бік на такій швидкості, то можна тільки фазу Z читати. Тоді 1 PPR виходить, можна рахувати хоч мільйон об/хв.
А ще у атмеги є input capture, якщо програмної швидкодії недостатньо.
Неактивний
#14 2026-04-28 07:19:55
- jokeer
- Гість
Re: скетч, що керує електродвигуном із зворотним зв’язком
Дійсно. Якщо автору потрібно тільки рахувати rpm, йому і енкодер за 1500 грн не потрібен. Досить магніта і датчика Холла за 20 грн. Або взяти BLDC і крутити з потрібною швидкістю.
#16 2026-04-28 13:19:04
- jokeer
- Гість
Re: скетч, що керує електродвигуном із зворотним зв’язком
Візьміть осцилограф і подивіться що він там вертає.
Або візьміть абсолютну будь яку демку від будь якої ліби для енкодера і покрутіть. Демка повинна бути робоча.
#17 2026-04-28 13:21:59
- jokeer
- Гість
Re: скетч, що керує електродвигуном із зворотним зв’язком
До речі pid регулятор не дасть вам точного регулювання. Дасть приблизне. Якщо треба справді точно - беріть bldc.
#18 2026-04-28 14:32:21
- dimich
- Учасник
- Зареєстрований: 2023-12-01
- Повідомлень: 835
Re: скетч, що керує електродвигуном із зворотним зв’язком
Можливо, проблема саме в цьому енкодері?
Можливо. Але дуже малоймовірно. Також можливо, що проблема десь у зʼєднаннях, платі чи контролері. Це теж малоймовірно.
Майже впевнений, що проблема в коді, а коду ми не бачили.
Напишіть програму, що пише стан входів у Serial. Повільно обертайте енкодер і перевірте, чи бачите очікуваний квадратурний сигнал.
Якщо все ок, напишіть мінімальну програму, яка обчислює швидкість обертів і видає результат в Serial. Якщо працює не так як очікується, то показуйте код.
Мені потрібне точне регулювання обертів
Точне - це яке в цифрах?
При інтервалі в 1 секунду з PPR 10 точність виміру не перевищуватиме 5-6 об/хв. При 30 об/хв це 20%.
А точність регулювання, навіть при ідеально підібраних коефіцієнтах PID, залежатиме як від точності виміру, так і від властивостей керованої системи: потужності двигуна, характеристики навантаження.
Ви можете лише визначити, що відхилення поточної швидкості від цільової перевищує заданий поріг.
Неактивний
#19 2026-04-28 18:08:44
- nickjust
- Учасник

- Зареєстрований: 2024-06-13
- Повідомлень: 55
Re: скетч, що керує електродвигуном із зворотним зв’язком
Починай з каналу А
відкрий Serial Monitor (9600),помалу зроби 1 оберт
повинен побачити
Pulses: 10
якщо 10 - гуд,якщо інше - херовий контакт,живлення енкодера,довгі дроти,підтяжка
включити INPUT_PULLUP , додати кондюк 0.1 мкФ на землю (A → GND)
У Omron E6B2-CWZ6C: вихід транзисторний -«1» формується підтяжкой
фронт може бути «брудний» → берем тілько RISING
const byte pinA = 2; // обязательно пин с прерыванием (UNO: 2 или 3)
volatile unsigned int pulses = 0;
void isrA() {
pulses++; // считаем только фронт
}
void setup() {
Serial.begin(9600);
pinMode(pinA, INPUT); // если есть внешняя подтяжка
// pinMode(pinA, INPUT_PULLUP); // включи это, если сомневаешься
attachInterrupt(digitalPinToInterrupt(pinA), isrA, RISING);
//attachInterrupt(digitalPinToInterrupt(pinA), isrA, CHANGE); // 20 имп на оборот
Serial.println("Start test");
}
void loop() {
static unsigned int last = 0;
if (pulses != last) {
Serial.print("Pulses: ");
Serial.println(pulses);
last = pulses;
}
}Остання редакція nickjust (2026-04-28 18:16:34)
Неактивний
#20 2026-04-28 19:19:30
- dimich
- Учасник
- Зареєстрований: 2023-12-01
- Повідомлень: 835
Re: скетч, що керує електродвигуном із зворотним зв’язком
В цьому скетчі вже баги.
1. 16-бітна змінна pulses змінюється в ISR, а читається неатомарно.
2.
if (pulses != last) {
...
Serial.println(pulses);
last = pulses;Тут race condition. При всіх трьох зчитуваннях pulses може мати три різні значення.
Неактивний
#21 2026-04-28 19:42:00
- jokeR
- Учасник
- Зареєстрований: 2024-12-12
- Повідомлень: 200
Re: скетч, що керує електродвигуном із зворотним зв’язком
![]()
Тобто варто взяти 32 розрядний проц - і можна за атомарність не паритись? ![]()
Тут 2 речі незрозуміло.. Чому 9600 а не 115200. І чому не взяти готову лібу, навіщо вайбкодити те що вже зроблено і бездоганно працює? Чи це челлендж такий? ![]()
Неактивний
#22 2026-04-28 20:07:03
- dimich
- Учасник
- Зареєстрований: 2023-12-01
- Повідомлень: 835
Re: скетч, що керує електродвигуном із зворотним зв’язком
Тобто варто взяти 32 розрядний проц - і можна за атомарність не паритись?
Якщо атомарність доступа до слова цієї розрядності гарантується апаратно, то для одиничного запису чи читання - так, можна не паритись. Лише впевнитись, що змінна розміщується з необхідним вирівнюванням (зазвичай це також гарантується). Але на деяких архітектурах може довестись паритись із реордерінгом інструкцій та memory барʼєрами, а іноді і з інвалідацією кеша ![]()
А при read/modify/write все одно потрібна синхронізація.
Неактивний
#23 2026-04-28 20:16:31
- nickjust
- Учасник
- Зареєстрований: 2024-06-13
- Повідомлень: 55
Re: скетч, що керує електродвигуном із зворотним зв’язком
А так?
const byte pinA = 2;
volatile uint16_t pulses = 0;
void isrA() {
pulses++; // ISR короткий — это хорошо
}
void setup() {
Serial.begin(9600);
pinMode(pinA, INPUT); // или INPUT_PULLUP при необходимости
attachInterrupt(digitalPinToInterrupt(pinA), isrA, RISING);
}
void loop() {
static uint16_t last = 0;
uint16_t snapshot;
noInterrupts(); // критическая секция
snapshot = pulses; // атомарный снимок
interrupts();
if (snapshot != last) {
Serial.print("Pulses: ");
Serial.println(snapshot);
last = snapshot;
}
}і знову jokeR правий,можна простіше
відкриваємо Arduino IDE
Sketch → Include Library → Manage Libraries
В пошуку пишемо:
Encoder
либа от Paul Stoffregen
нюанс-либа рахує x4-10 P/R → 40 імпульсів/оберт
Остання редакція nickjust (2026-04-28 20:24:16)
Неактивний
#24 2026-04-28 20:58:34
- jokeR
- Учасник
- Зареєстрований: 2024-12-12
- Повідомлень: 200
Re: скетч, що керує електродвигуном із зворотним зв’язком
нюанс-либа рахує x4-10 P/R → 40 імпульсів/оберт
Ну так на то і енкодер.
Взагалі для вимірювання швидкості та ліба (разом з енкодером) - це мікроскоп для забивання шурупів ![]() Можна взяти timer-counter і просто рахувати імпульси.
Можна взяти timer-counter і просто рахувати імпульси.
Неактивний
#25 2026-04-28 21:54:41
- dimich
- Учасник
- Зареєстрований: 2023-12-01
- Повідомлень: 835
Re: скетч, що керує електродвигуном із зворотним зв’язком
А так?
Так уже краще. ChatGPT вчиться? ![]()
додати кондюк 0.1 мкФ на землю (A → GND)
З підтяжкою 10 кОм такий конденсатор утворюватиме ФНЧ з частотою зрізу 160 Гц. А з вбудованою - десь 60-70 Гц. На 300 об/хв може ще не впливатиме, але якщо більше - вже не годиться.
Щоб позбутись "брудних" фронтів (якщо вони там дійсно є і заважають), можна просто рахувати по обом фронтам фази A скільки раз фаза B змінила значення на протилежне від попереднього.
либа от Paul Stoffregen
нюанс-либа рахує x4-10 P/R → 40 імпульсів/оберт
То вже якесь збочення.
Неактивний