Ви не увійшли.
- Теми: Активні | Без відповіді
#51 2025-04-17 20:19:27
- jokeer
- Гість

Re: Лічильник оборотів на моторчику від CD
Ніт, не пройшла фотка
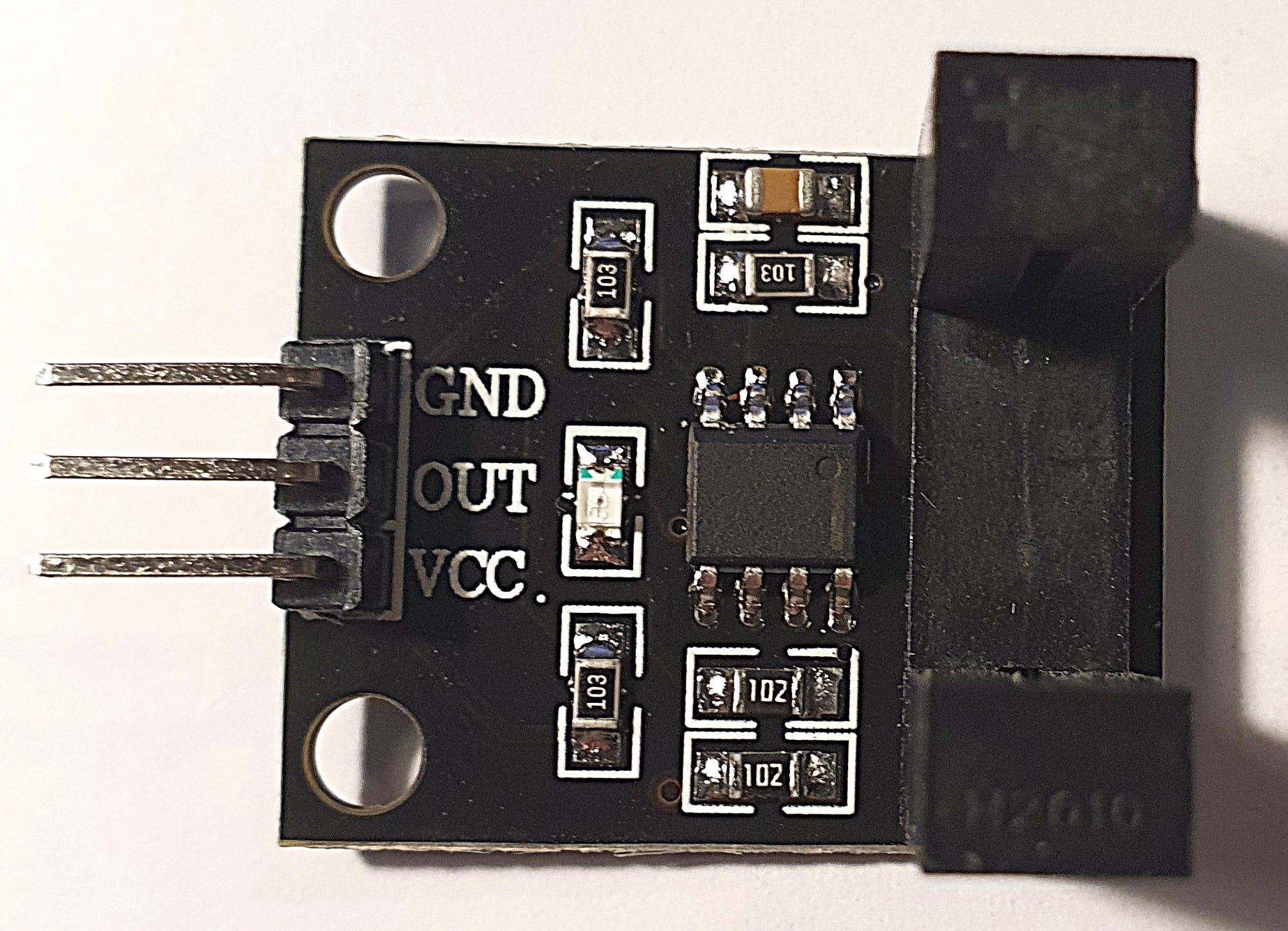
Дивіться. Якщо потрібно просто рахувати оберти - просто рахуйте переходи з 0 в 1. Якщо треба враховувати напрямок - потрібно спочатку правильно скомпонувати 2 датчика.
#52 2025-04-17 20:21:24
- АлександрК
- Гість
Re: Лічильник оборотів на моторчику від CD
jokeer пише:Ще б зрозуміти що там за датчик.. або хтось взяв і намалював графік сигналів що приходять..
Пробував надіслати фото, не минає
WhatsApp, Telegramm?
#53 2025-04-17 20:24:49
- АлександрК
- Гість
Re: Лічильник оборотів на моторчику від CD
Ніт, не пройшла фотка
Дивіться. Якщо потрібно просто рахувати оберти - просто рахуйте переходи з 0 в 1. Якщо треба враховувати напрямок - потрібно спочатку правильно скомпонувати 2 датчика.
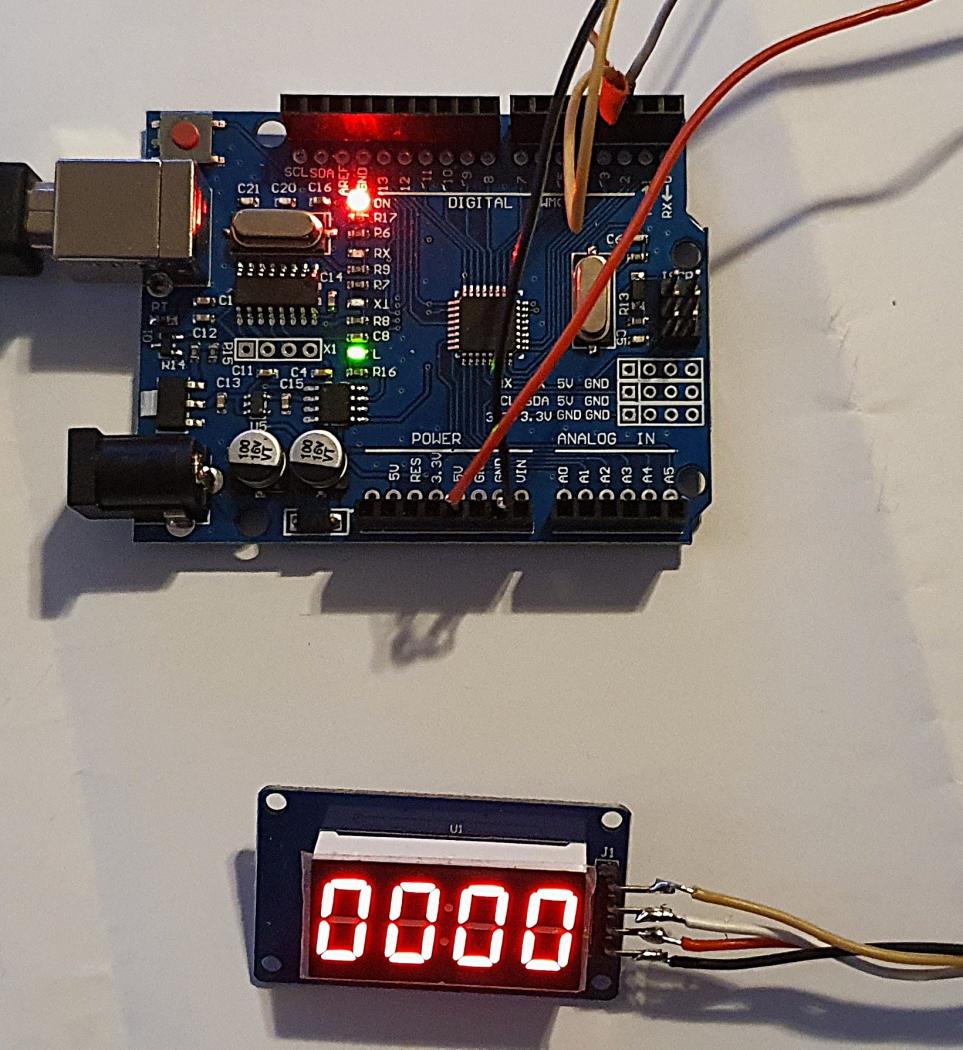
Треба хоча б на дисплеї рахунок отримати 0001 0002 хай через кнопку
#54 2025-04-17 20:26:31
- dimich
- Учасник

- Зареєстрований: 2023-12-01
- Повідомлень: 844
Re: Лічильник оборотів на моторчику від CD
Максимальна частота обертання 1000 оборотів за хвилину
Тобто при рівномірному квадратурному сигналі 15 мілісекунд між фронтами. Навіть при куті між датчиками в 15° мінімальний інтервал між фронтами буде порядка 500 мкс. Це ж як треба програму написати, щоб була проблема?
Неактивний
#55 2025-04-17 20:27:00
- АлександрК
- Гість
Re: Лічильник оборотів на моторчику від CD
jokeer пише:Ніт, не пройшла фотка
Дивіться. Якщо потрібно просто рахувати оберти - просто рахуйте переходи з 0 в 1. Якщо треба враховувати напрямок - потрібно спочатку правильно скомпонувати 2 датчика.Треба хоча б на дисплеї рахунок отримати 0001 0002 хай через кнопку
Як, щоб лилося? Дістаньте пістолет і засуньте його в бензобак...
#56 2025-04-17 20:31:44
- АлександрК
- Гість
Re: Лічильник оборотів на моторчику від CD
АлександрК пише:Максимальна частота обертання 1000 оборотів за хвилину
Тобто при рівномірному квадратурному сигналі 15 мілісекунд між фронтами. Навіть при куті між датчиками в 15° мінімальний інтервал між фронтами буде порядка 500 мкс. Це ж як треба програму написати, щоб була проблема?
Пишу програму вдруге. Перший раз було легше, майже все взяв із інтернету. Програма була з інфрачервоним пультом

#58 2025-04-18 10:37:44
- АлександрК
- Гість
Re: Лічильник оборотів на моторчику від CD
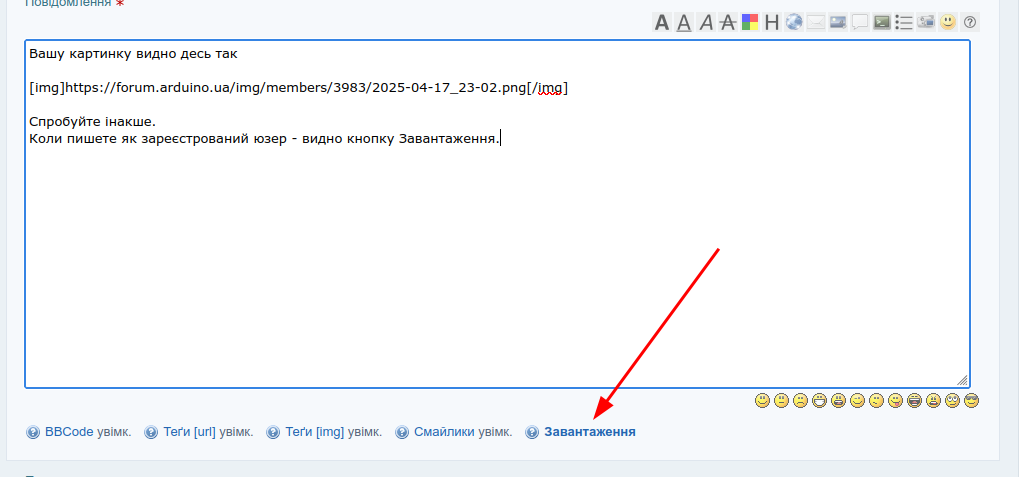
Вашу картинку видно десь так
https://forum.arduino.ua/img/members/3983/2025-04-17_23-02.png
Спробуйте інакше.
Коли пишете як зареєстрований юзер - видно кнопку Завантаження.https://forum.arduino.ua/img/members/3983/2025-04-17_23-05.png
У мене тільки смайлики.Завантаження немає
#59 2025-04-18 10:50:09
- jokeer
- Гість
Re: Лічильник оборотів на моторчику від CD
Тому що цей пост написано як гість. Потрібно з логіном і паролем
#60 2025-04-18 12:12:10
- АлександрK
- Учасник
- Зареєстрований: 2025-04-12
- Повідомлень: 9
Re: Лічильник оборотів на моторчику від CD
Пробую фото
Неактивний
#61 2025-04-18 12:13:16
- АлександрK
- Учасник
- Зареєстрований: 2025-04-12
- Повідомлень: 9
Re: Лічильник оборотів на моторчику від CD
Неактивний
#62 2025-04-18 12:20:12
- jokeer
- Гість
Re: Лічильник оборотів на моторчику від CD
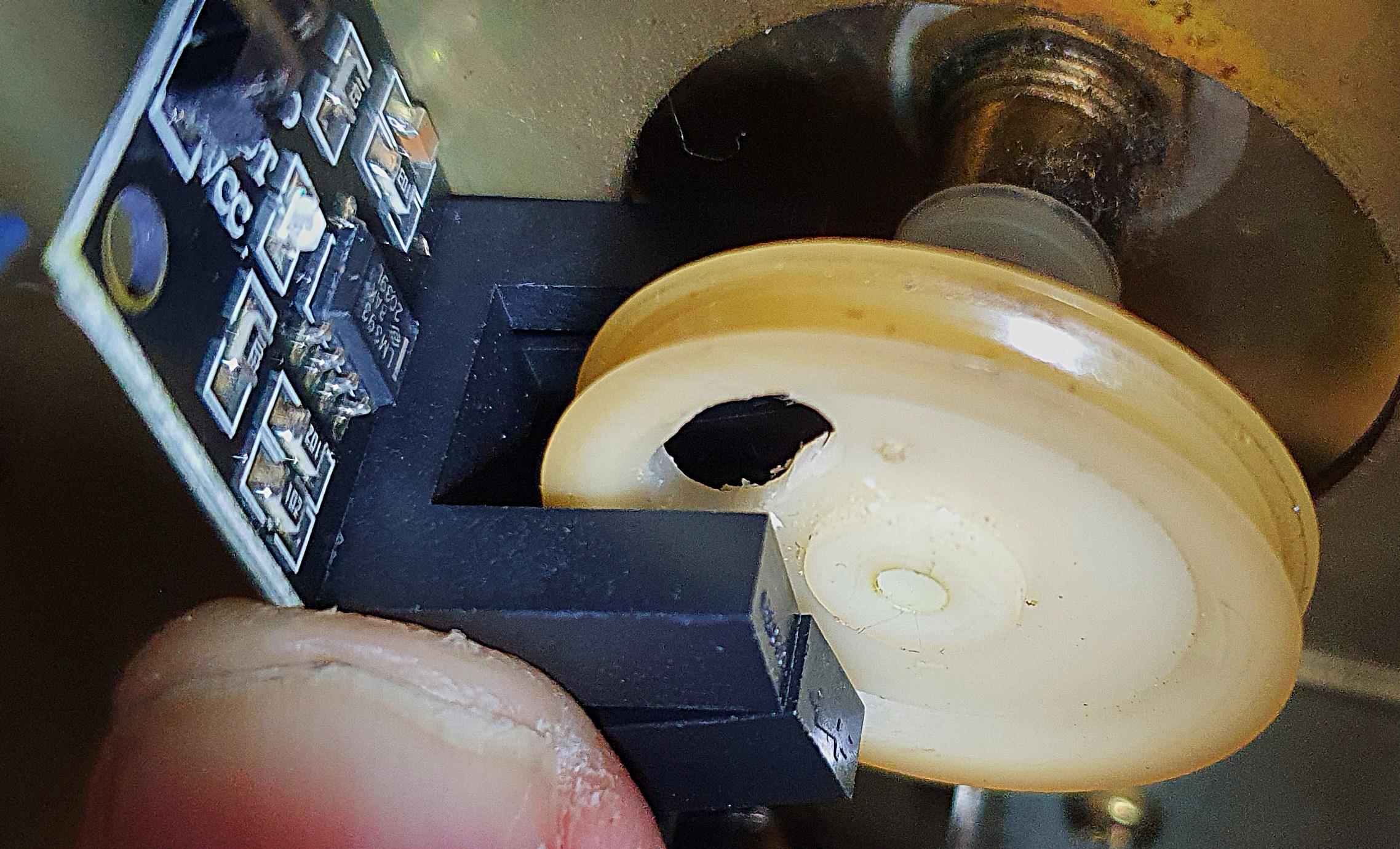
Ок. Маховик з отворотом і 1 датчик, правильно? Це не про великі оберти, і не про вгадування напрямку. Правильно?
#63 2025-04-18 12:25:30
- АлександрK
- Учасник
- Зареєстрований: 2025-04-12
- Повідомлень: 9
Re: Лічильник оборотів на моторчику від CD
так
Неактивний
#64 2025-04-18 12:27:39
- jokeer
- Гість
Re: Лічильник оборотів на моторчику від CD
int x0, x1;
void main()
{
x1 = digital read();
if (x1 != x0)
{
counter++;
};
x0=x1;
}
Десь так.
#65 2025-04-18 12:27:41
- АлександрK
- Учасник
- Зареєстрований: 2025-04-12
- Повідомлень: 9
Re: Лічильник оборотів на моторчику від CD
Ок. Маховик з отворотом і 1 датчик, правильно? Це не про великі оберти, і не про вгадування напрямку. Правильно?
2 датчики, кожен працює лише в один бік.
Неактивний
#66 2025-04-18 12:29:16
- jokeer
- Гість
Re: Лічильник оборотів на моторчику від CD
За рахунок чого вони працюють в різні боки, я не розумію. Дірка анізотропна в усі боки ![]()
#67 2025-04-18 12:34:42
- jokeer
- Гість
Re: Лічильник оборотів на моторчику від CD
Візьміть олівець і намалюйте, які сигнали прийдуть з обох датчиків при обертанні в одну і іншу сторону.
#68 2025-04-18 12:35:36
- АлександрK
- Учасник
- Зареєстрований: 2025-04-12
- Повідомлень: 9
Re: Лічильник оборотів на моторчику від CD
За рахунок чого вони працюють в різні боки, я не розумію. Дірка анізотропна в усі боки
Я зібрав схему. Сигнал від датчика надходить на ардуїно тільки при певному обертанні. Мотор постійного струму. При позитивному обертанні працює один датчик, при іншому негативному.
Неактивний
#69 2025-04-18 12:41:06
- jokeer
- Гість
Re: Лічильник оборотів на моторчику від CD
Ну, я вам не вірю ![]() але якщо ваші датчики дійсно так працюють, як ви стверджуєте, беріть той кусок коду що я нашкрябав. Для другого датчика так само, але counter --
але якщо ваші датчики дійсно так працюють, як ви стверджуєте, беріть той кусок коду що я нашкрябав. Для другого датчика так само, але counter --
Я попередив, за кожний оберт спрацюють обидва датчики по черзі, і лічильник не поміняє значення.
#70 2025-04-18 13:13:21
- jokeer
- Гість
Re: Лічильник оборотів на моторчику від CD
О. нарешті придумав, як зробити щоб воно у вас працювало ![]()
Потрібно 3 датчика і 1 отвір ![]()
Якщо датчики спрацьовують 123 - обертається в одну сторону. 321 - в іншу. Рахувати не оберти, а 1/3 оберта, при відображенні - ділити на 3.
Той мій код годиться; повторити 3 рази.
#71 2025-04-18 15:40:33
- dimich
- Учасник
- Зареєстрований: 2023-12-01
- Повідомлень: 844
Re: Лічильник оборотів на моторчику від CD
Які ще три датчика? Ви якісь велосипеди вигадуєте. Отвір має бути такої довжини, щоби було положення, при якому активні обидва датчика.
Назвемо їх A і B.
При обертанні в один бік спочатку активується A, потім активується B, потім A дективується, потім B деактивується.
При обертанні в інший бік все у зворотньому порядку: спочатку активується B, потім активується A, потім B деактивується, потім A деактивується.
Форма сигналів буде наступна:
┌───┐
A ────┘ └─────
┌───┐
B ─────┘ └─────
┌───┐
A ─────┘ └─────
┌───┐
B ────┘ └──────Працювати як зі звичайним обертовим енкодером. При правильній реалізації не потрібно ніякого debounce, і не важливо, чи у датчиків активний високий, чи низький.
Для механічного балансу можете симетрично прорізати другий отвір, тоді буде рахувати напів-оберти.
Неактивний
#72 2025-04-18 15:57:53
- jokeer
- Гість
Re: Лічильник оборотів на моторчику від CD
Велосипеди наше всьо ![]() Раз автор не загуглив, значить йому насправді хотілось чогось креативного
Раз автор не загуглив, значить йому насправді хотілось чогось креативного ![]()
Енкодер річ прикольна, і правильна, я повністю згоден. але потрібно або 3д принтер, або досить прямі руки. Для 3 датчиків годяться руки будь-якої форми ![]() .
.
#73 2025-04-18 16:02:25
- jokeer
- Гість
Re: Лічильник оборотів на моторчику від CD
Просто якщо досить великий отвір різати руками, то хз як воно поведе себе на великих обертах. Правда, які оберти будуть великими теж хз.
#74 2025-04-18 16:07:49
- dimich
- Учасник
- Зареєстрований: 2023-12-01
- Повідомлень: 844
Re: Лічильник оборотів на моторчику від CD
Енкодер річ прикольна, і правильна, я повністю згоден. але потрібно або 3д принтер, або досить прямі руки.
Та працюватиме і з такою конструкцією як у автора, тільки отвір має бути достатньої довжини, щоб обидва датчики могли бути активними одночасно.
Для 3 датчиків годяться руки будь-якої форми
.
Судячи по фото, там і два ледве влізе, куди там третій. Там подвійний, як в кульковій миші, добре би вписався.
Неактивний
#75 2025-04-18 17:27:47
- jokeer
- Гість
Re: Лічильник оборотів на моторчику від CD
Треба випаяти датчики з модулів, запаяти в свою плату, і все влізе ![]()
Або прорізати 2 симертичні отвори, щоб баланс не ламався, а датчики розмістити трохи асиметрично, кожний поряд із своїм отвором, щоб послідовність спрацьовування була як на картинці. Але це знов буде зовсім неочевидно ![]()