Ви не увійшли.
- Теми: Активні | Без відповіді
#26 2019-07-31 10:38:28
- mitonn
- Учасник

- Зареєстрований: 2019-03-01
- Повідомлень: 25
Re: Радиоуправление на NRF24L01
Выкладываю схему приемника (прошу прощения за каракули).Позволяет управлять нагрузкой двигателя и 3 сервопривода.Драйвер двигателя не показан, только управление.Питание NRF24L01 через AMS 1117 3.3в , питание сервоприводов через стабилизатор L7805.Дополнительно на плате сделана мигалка для светодиодов (поочередное мигание), все диоды 3 вольта.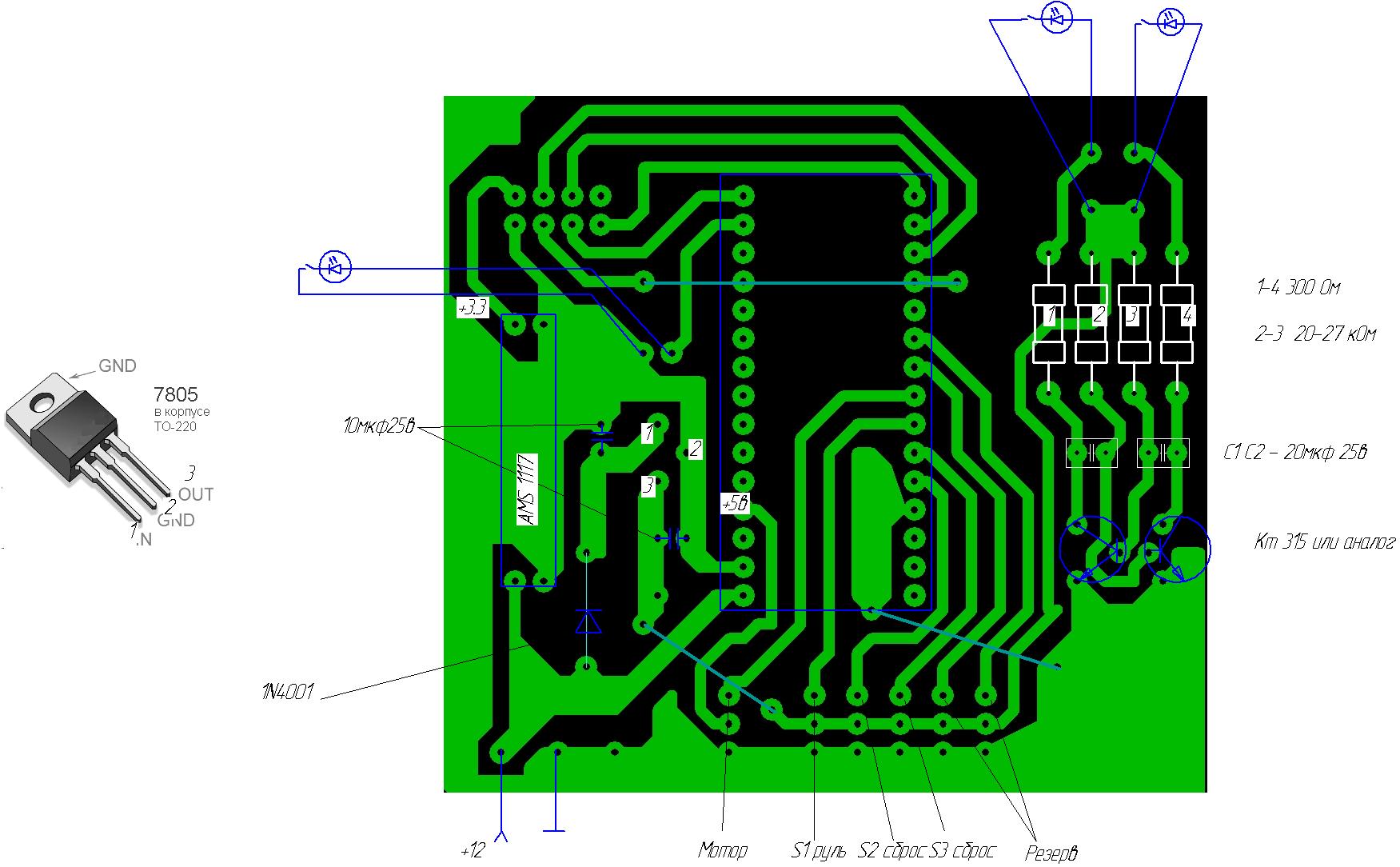
Остання редакція mitonn (2019-08-01 14:48:50)
Неактивний
#27 2019-08-12 19:20:58
- ВалерийЛ
- Гість
Re: Радиоуправление на NRF24L01
Добрый день!
Помогите разобраться в вопросе возникшем при создании дистанционного управления фотовспышками и подскажите каким образом можно решить его. Суть сводиться к следующему, приемо-передающие устройства собраны на модулях Arduino Pro Mini (3,3v) и nRF24L01+. Управляемый модуль твердотельное реле (светодиод с периодом срабатывания 1mS- что соответствует выдержке фотоаппарата 1/1000). Желаемая скорость шторки 1/500 (2mS) или 1/400 (2.5mS). Фактическая 1/100 (10mS).
Изменения скетча в пунктах:
...
Serial.begin(9600);
...
radio.setRetries(0, 15);
...
radio.setPayloadSize(32);
...
radio.setDataRate (RF24_250KBPS);
результатов не дали. Обращение к исполнителю в скетче приёмника идёт на прямую к портам Atmegi
...
PORTD |= (1<<...);
delay (10);
PORTD &= (1<<...);. Такой вариант в чистом виде, без приема передачи через nRF срабатывает на 1/400
#28 2019-08-12 20:42:47
- Watchdog
- Гість
Re: Радиоуправление на NRF24L01
Использовать классический оптический способ, по ведущей вспышке.
#29 2019-08-12 22:38:20
- ВалерийЛ
- Гість
Re: Радиоуправление на NRF24L01
Благодарю. Но к сожалению использовать его не всегда получается.
#30 2020-01-04 23:11:23
- Uhimka
- Гість
Re: Радиоуправление на NRF24L01
Буду очень блогодарен еслиВы вышлите мне скетчи и схему на мой почтовый ящик а то неполучается перевести их из формата txt в формат ino.
#31 2020-01-05 21:12:46
- mitonn
- Учасник
- Зареєстрований: 2019-03-01
- Повідомлень: 25
Re: Радиоуправление на NRF24L01
Буду очень блогодарен еслиВы вышлите мне скетчи и схему на мой почтовый ящик а то неполучается перевести их из формата txt в формат ino.
Скетчи сбросил.Схем у меня нет,только отдельные зарисовки.Если нужно, то нарисую но не сейчас.
Неактивний
#32 2020-03-09 17:13:04
- Хохлоскаль
- Гість
Re: Радиоуправление на NRF24L01
Тестировали на расстояние ПУ?
#34 2020-05-22 11:59:52
- mitonn
- Учасник
- Зареєстрований: 2019-03-01
- Повідомлень: 25
Re: Радиоуправление на NRF24L01
Всем привет! Хочу доработать данное р/управление. Суть вопроса заключается в том, что под воздействием ветра, волны, лески от завозимой снасти - кораблик отклоняется от траектории и приходится все время подруливать. На дальности до 50-100 м нет проблем, а на 200-250 м это уже сложнее, а ночью даже проблематично. Второй вопрос - возврат. Самое простое - установка автопилота! но при стоимости моего кораблика 60-70$ ставить телеметрию за 200-400$??? Хочу решить вопрос установкой акселерометра и гироскопа
MPU-6050 или магнитометр HMC5983. Никогда не работал с такими датчиками, если у кого есть опыт работы с ними и желание поделиться знаниями то буду рад. Другие решения?
Неактивний
#35 2020-05-22 14:48:25
- Mishka
- Учасник
- Зареєстрований: 2019-11-18
- Повідомлень: 93
Re: Радиоуправление на NRF24L01
Думаю, что для автоматического подруливания может пригодиться компас - магнитометр с акселерометром, например, LSM303AGR. Из-за покачиваний кораблика на волнах скорее всего нужно будет учитывать все шесть осей. Это проще обрабатывать с помощью одного из алгоритмов машинного обучения. Очевидно, что понадобится фильтр Калмана.
Увеличить дистанцию с nRF24 можно разными способами. Если есть прицельная видимость, то самый дешевый способ - использовать направленную антенну на передатчике. В зависимости от конструкции антенны это должно поднять уровень передаваемого сигнала в сторону кораблика в среднем на 6-9 Дб и, соответственно, увеличить дистанцию раза в два-три. С другой стороны, можно взять модуль nRF24 со встроенным PA/LNA. К тому же такие модули обычно имеют не только более чувствительные антенны, но и лучше держат ее настройку. Это добавит около 8-10 Дб к чувствительности приемника кораблика, что будет соизмеримо с результатом направленной антенны. Само собой, можно использовать оба подхода одновременно.
Ну и в качестве альтернативы, можно рассмотреть переход на Bluetooth 5, который регламентирует помехоустойчивое кодирование (coded phy) и увеличивает дистанцию где-то в те же самые два-три раза. Для этого понадобится заменить nRF24 на одну из микросхем серии nRF52, которая имеет поддержку long range. В контексте этой задачи имеет смысл сразу иметь поддержку Bluetooth 5.1 Direction Finding - кораблик тогда вернется назад, просто как на маяк в море. Это ограничивает выбор до микросхем nRF52811 для приемника кораблика (чувствительность около -97Дб), и nRF52820 / nRF52833 для передатчика. Но можно взять и все одинаковые, например, nRF52811 и иметь PA/LNA. В таком случае усилитель должен иметь возможность переключать антенны, чтобы полноценно работал алгоритм direction finding.
В теории, сочетание coded phy + усилители на приемнике (+10Дб) и передатчике (+20Дб) + направленная антенна (+10Дб) может увеличить энергетический баланс на +30..35 Дб и, соответственно, дальность Bluetooth раз в пятьдесят. Это может составить свыше 5 км.
Еще один вариант - это модули LoRa. За счет высокого энергетического баланса линии и помехоустойчивого кодирования дальность связи может быть до 10 км. При плохой связи задержка, однако, может доходить до нескольких секунд. Что, впрочем, на таких дистанциях в море может быть приравнено к управлению спутником в космосе :-)
Остання редакція Mishka (2020-05-24 20:14:42)
Неактивний
#36 2020-10-01 11:14:16
- ник......12
- Гість
Re: Радиоуправление на NRF24L01
помогие разабраться со скетчем для кораблика на корабле 1 бк мотор и 2 сервы
#37 2020-10-01 11:15:52
- ник......12
- Гість
Re: Радиоуправление на NRF24L01
кто в этом понимает оставте координаты для вязи , и я напшу вам суть
#38 2020-10-01 17:20:40
- ник......12
- Гість
Re: Радиоуправление на NRF24L01
или miton покажи как к твоим кетчам подключить провода,пожалуйта
#39 2020-10-05 14:06:42
- mitonn
- Учасник
- Зареєстрований: 2019-03-01
- Повідомлень: 25
Re: Радиоуправление на NRF24L01
Что конкретно по подключению?
Каждый сервопривод имеет три провода коричневый (черный) -это минусовой (земля), средний провод - красный - это +5 вольт, желтый( оранжевый или белый) это провод управления. Соответственно на плате которую я показывал раньше и подключаем- коричневый к -, красный к +, а желтый в зависимости что серва должна делать. Руль - плавное управление вправо- влево, сброс бункера - при нажатии на кнопку - поворот на макс и при отпускании кнопки- возврат. Для подключения мотора (бесколлекторного) необходим регулятор (драйвер, блок управления ) скорости. Регулятор имеет 8 выводов. Три на разъеме, подключаются аналогично серве, но на выводы мотор. Три синих подключаются к двигателю и на два оставшихся подается питание 12 вольт (красный + и черный -).
Неактивний
#40 2020-10-06 17:00:33
- ник......12
- Гість
Re: Радиоуправление на NRF24L01
возможо ли связаться как то с вами , а то на форуме не одиин день уйдет на обьяснния
#42 2020-10-09 17:33:44
- Pashkoff
- Гість
Re: Радиоуправление на NRF24L01
Здравствуйте Мitonn!!!
Вопрос про радиоуправление корабликом.
1.В написании и программировании я профан, но с паяльником дружу с детства.
Руль поворота работает не пропорционально, в праву сторону заруливает примерно раза в три больше чем в лево (разные джойстики пробовал, одинаково), где в скечте настройками поиграть (отцентровать)???
2.Как в скетче прописать управление L297N для коллекторного двигателя (ходовой двигатель) вместо бес коллекторного???
Спасибо!!!
#43 2020-10-13 18:21:35
- ник......12
- Гість
Re: Радиоуправление на NRF24L01
mitonn я вроде написал тебе не заю вышло или нет
#44 2021-03-12 20:53:20
- bulog
- Гість
Re: Радиоуправление на NRF24L01
Подскажите пожалуйста,что не так в этом коде?
Есть коллекторный мотор и сервопривод. По отдельности они работают нормально, а вместе не хотят.
Заранее спасибо!
#include <Servo.h>
Servo myservo1;
Servo myservo2;
int val;
int val1;
void setup() {
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(A2, INPUT);
pinMode(A4, INPUT);
pinMode(A6, INPUT);
myservo1.attach(5);
myservo2.attach(6);
}
void loop() {
myservo1.write(map(analogRead(A2),0,1023,0,180));
myservo2.write(map(analogRead(A4),0,1023,0,180));
val = analogRead(A6);
val1 = map(val, 0, 1023, 0, 255);
analogWrite(9, val1);
analogWrite(10,0);
}
#45 2025-08-14 17:56:17
- yri2021
- Учасник
- Зареєстрований: 2025-08-14
- Повідомлень: 1
Re: Радиоуправление на NRF24L01
так я просто ххотел спросить. нано греется при подключении радио модуля. их надо отдельно запитывать. и таже проблема. подключение радиомодуля к ардуино дает эфффект что нет такого порта. меня смущает нагрев ардуинки. как убираю электролит нет нагрева. и для пользователей! много писали, сто мпу6050 без электролита не работает. Фигня!
Неактивний
#46 2025-08-14 19:46:57
- jokeer
- Гість
Re: Радиоуправление на NRF24L01
В ардуїнці стоїть дрібний стабілизатор, який може віддати 100 мА. Якщо ви його навантажите - він або нагріється, або в ньому спрацює захист (і порт відвалиться, бо він живиться від того ж ldo), або згорить.
>> Фигня!
Підтримую.