Ви не увійшли.
- Теми: Активні | Без відповіді
Сторінки 1
#1 2017-02-16 01:19:32
- Vitaly
- Учасник

- Зареєстрований: 2017-02-16
- Повідомлень: 9
Помогите с програмированием...
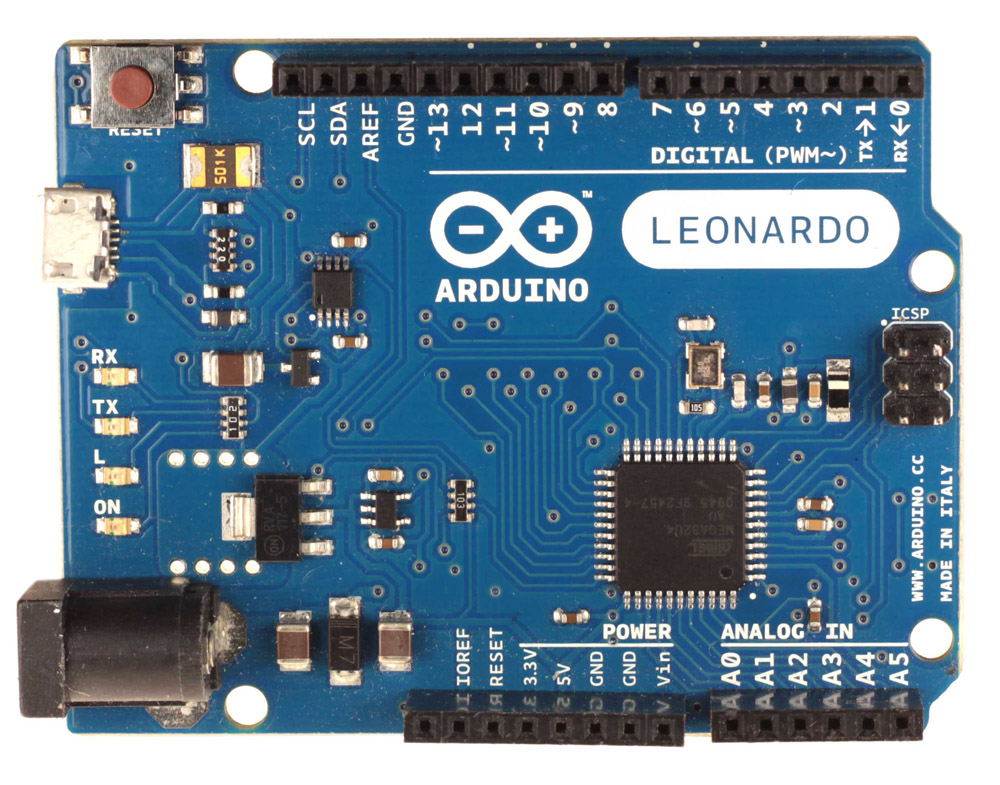
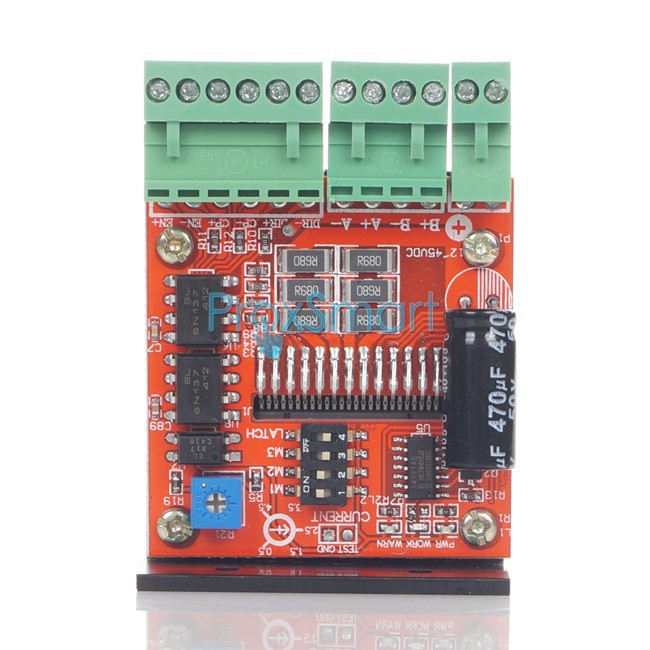
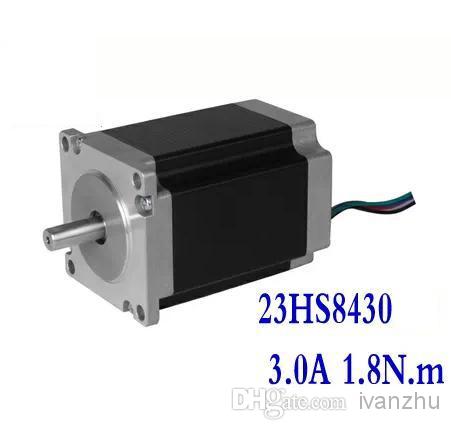
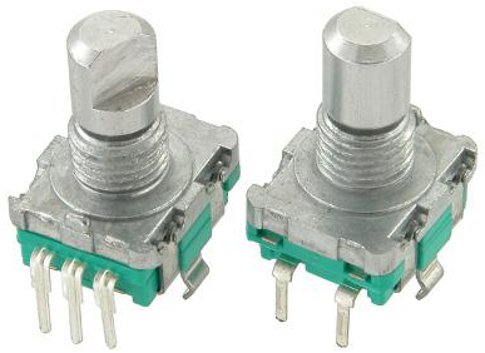 Помогите сделать управление шаговым двигателем с помощью энкодера. Поворот энкодера вправо на один шаг - поворот двигателя вправо на один шаг, поворот энкодера влево на один шаг - двигатель влево на один шаг. есть энкодер, шаговый двигатель 23HS8430 3a, драйвер TB6600, ардуино леонардо. я в этом новичок.
Помогите сделать управление шаговым двигателем с помощью энкодера. Поворот энкодера вправо на один шаг - поворот двигателя вправо на один шаг, поворот энкодера влево на один шаг - двигатель влево на один шаг. есть энкодер, шаговый двигатель 23HS8430 3a, драйвер TB6600, ардуино леонардо. я в этом новичок.
Неактивний
#2 2017-02-16 08:19:00
- IgorT12
- Учасник

- Зареєстрований: 2017-01-28
- Повідомлень: 10
Re: Помогите с програмированием...
Как новичку советую, если задача затруднительна - раздроби её на меньшие и простые, но решаемые. Т.е. поморгай светиком от энкодера ( смотри и разбирай пример ), а затем шаговик таким же макаром. Получится - я знаю!!! Сам сколько раз спотыкался ![]() .
.
Потом смотри примеры выполнения по условию. У тебя железо, результат будет виден сразу.
Неактивний
#3 2017-02-16 08:45:04
- vvr
- Учасник
- Зареєстрований: 2015-04-12
- Повідомлень: 896
Re: Помогите с програмированием...
есть несколько путей.
1. читаем книжки, лазим по форумам, учимся программировать.
пробуем писать программу.
если что то не получается - показываем код и задаём вопросы, может быть кто то подскажет)))
это если интересно и хочется в этом направлении развиваться...
2. формулируем задачу, озвучиваем бюджет и заказываем за денежку.
а это если не хочется возиться)))
p.s. ждать что кто то просто так будет тратить своё время не стоит...
Остання редакція vvr (2017-02-16 08:47:49)
Неактивний
#4 2017-02-16 21:42:19
- Vitaly
- Учасник
- Зареєстрований: 2017-02-16
- Повідомлень: 9
Re: Помогите с програмированием...
Есть такой код. не могу залить его в ардуино леонардо. пишет exit status 1
Ошибка компиляции для платы Arduino Leonardo.
/* Include the library */
#include "HCMotor.h"
/* Pins used to drive the motors */
#define DIR_PIN 8 //Connect to drive modules 'direction' input.
#define CLK_PIN 9 //Connect to drive modules 'step' or 'CLK' input.
/* Set the analogue pin the potentiometer will be connected to. */
#define POT_PIN A0
/* Set a dead area at the centre of the pot where it crosses from forward to reverse */
#define DEADZONE 20
/* The analogue pin will return values between 0 and 1024 so divide this up between
forward and reverse */
#define POT_REV_MIN 0
#define POT_REV_MAX (512 - DEADZONE)
#define POT_FWD_MIN (512 + DEADZONE)
#define POT_FWD_MAX 1024
/* Create an instance of the library */
HCMotor HCMotor;
void setup()
{
//Serial.begin(9600);
/* Initialise the library */
HCMotor.Init();
/* Attach motor 0 to digital pins 8 & 9. The first parameter specifies the
motor number, the second is the motor type, and the third and forth are the
digital pins that will control the motor */
HCMotor.attach(0, STEPPER, CLK_PIN, DIR_PIN);
/* Set the number of steps to continuous so the the motor is always turning whilst
not int he dead zone*/
HCMotor.Steps(0,CONTINUOUS);
}
void loop()
{
int Speed, Pot;
/* Read the analogue pin to determine the position of the pot. */
Pot = analogRead(POT_PIN);
/* Is the pot in the reverse position ? */
if (Pot >= POT_REV_MIN && Pot <= POT_REV_MAX)
{
HCMotor.Direction(0, REVERSE);
Speed = map(Pot, POT_REV_MIN, POT_REV_MAX, 10, 1024);
/* Is the pot in the forward position ? */
}else if (Pot >= POT_FWD_MIN && Pot <= POT_FWD_MAX)
{
HCMotor.Direction(0, FORWARD);
Speed = map(Pot, POT_FWD_MIN, POT_FWD_MAX, 1024, 10);
/* Is the pot in the dead zone ? */
}else
{
Speed = 0;
}
/* Set the duty cycle of the clock signal in 100uS increments */
HCMotor.DutyCycle(0, Speed);
}
Неактивний
#10 2017-02-16 22:21:15
- vvr
- Учасник
- Зареєстрований: 2015-04-12
- Повідомлень: 896
Re: Помогите с програмированием...
я не знаю как будет работать с 1.8.1 - у меня она не установлена
чтобы работало с леонардо нужно шаманить библиотеку - для этого нужно серьёзно в программировании разбираться)))
проще купить нано или уну с нужным камнем
Неактивний
#12 2017-02-16 22:28:58
- Vitaly
- Учасник
- Зареєстрований: 2017-02-16
- Повідомлень: 9
Re: Помогите с програмированием...
есть несколько путей.
1. читаем книжки, лазим по форумам, учимся программировать.
пробуем писать программу.
если что то не получается - показываем код и задаём вопросы, может быть кто то подскажет)))
это если интересно и хочется в этом направлении развиваться...
2. формулируем задачу, озвучиваем бюджет и заказываем за денежку.
а это если не хочется возиться)))p.s. ждать что кто то просто так будет тратить своё время не стоит...
на первый вариант у меня не так уж и много времени для создания этого проекта.
второй вариант интересно цена помощи.
Неактивний
#15 2017-02-22 08:17:55
- IgorT12
- Учасник
- Зареєстрований: 2017-01-28
- Повідомлень: 10
Re: Помогите с програмированием...
Тёзка. ты не прав!!!! ".....ИЛИ ВАС И....." знания этого языка тебе не помогут. А вот читать и вникать в прочитанное пора бы научиться. Для того чтоб тебе помогли практически нужно чтоб у кого то был в руках твой Леон. И к стати установки у тебя правильно указаны? "Инструменты - Плата- "
P.S. Пробуй другие версии IDE. У меня их несколько, каждая ведёт себя по своему .
Остання редакція IgorT12 (2017-02-22 08:20:14)
Неактивний
#19 2017-04-06 00:12:39
- Vitaly
- Учасник
- Зареєстрований: 2017-02-16
- Повідомлень: 9
Re: Помогите с програмированием...
// EasyDriver connections
#define step_pin 9 // Pin 9 connected to Steps pin on EasyDriver
#define dir_pin 8 // Pin 8 connected to Direction pin
#define SLEEP 12 // Pin 12 connected to SLEEP pin
volatile boolean TurnDetected; // need volatile for Interrupts
volatile boolean rotationdirection; // CW or CCW rotation
// Rotary Encoder Module connections
const int PinCLK=2; // Generating interrupts using CLK signal
const int PinDT=3; // Reading DT signal
const int PinSW=4; // Reading Push Button switch
int StepperPosition=0; // To store Stepper Motor Position
int StepsToTake=4; // Controls the speed of the Stepper per Rotary click
int direction; // Variable to set Rotation (CW-CCW) of stepper
// Interrupt routine runs if CLK goes from HIGH to LOW
void rotarydetect () {
delay(4); // delay for Debouncing
if (digitalRead(PinCLK))
rotationdirection= digitalRead(PinDT);
else
rotationdirection= !digitalRead(PinDT);
TurnDetected = true;
}
void setup () {
pinMode(dir_pin, OUTPUT);
pinMode(step_pin, OUTPUT);
pinMode(SLEEP, OUTPUT);
digitalWrite(SLEEP, HIGH); // Wake up EasyDriver
delay(5); // Wait for EasyDriver wake up
/* Configure type of Steps on EasyDriver:
//
// LOW LOW = Full Step //
// HIGH LOW = Half Step //
// LOW HIGH = A quarter of Step //
// HIGH HIGH = An eighth of Step //
*/
pinMode(PinCLK,INPUT); // Set Pin to Input
pinMode(PinDT,INPUT);
pinMode(PinSW,INPUT);
digitalWrite(PinSW, HIGH); // Pull-Up resistor for switch
attachInterrupt (0,rotarydetect,FALLING); // interrupt 0 always connected to pin 2 on Arduino UNO
}
void loop () {
if (!(digitalRead(PinSW))) { // check if button is pressed
if (StepperPosition == 0) { // check if button was already pressed
} else {
if (StepperPosition > 0) { // Stepper was moved CW
while (StepperPosition != 0){ // Do until Motor position is back to ZERO
digitalWrite(dir_pin, HIGH); // (HIGH = anti-clockwise / LOW = clockwise)
for (int x = 1; x < StepsToTake; x++) {
digitalWrite(step_pin, HIGH);
delay(1);
digitalWrite(step_pin, LOW);
delay(1);
}
StepperPosition=StepperPosition-StepsToTake;
}
}
else {
while (StepperPosition != 0){
digitalWrite(dir_pin, LOW); // (HIGH = anti-clockwise / LOW = clockwise)
for (int x = 1; x < StepsToTake; x++) {
digitalWrite(step_pin, HIGH);
delay(1);
digitalWrite(step_pin, LOW);
delay(1);
}
StepperPosition=StepperPosition+StepsToTake;
}
}
StepperPosition=0; // Reset position to ZERO after moving motor back
}
}
// Runs if rotation was detected
if (TurnDetected) {
TurnDetected = false; // do NOT repeat IF loop until new rotation detected
// Which direction to move Stepper motor
if (rotationdirection) { // Move motor CCW
digitalWrite(dir_pin, HIGH); // (HIGH = anti-clockwise / LOW = clockwise)
for (int x = 1; x < StepsToTake; x++) {
digitalWrite(step_pin, HIGH);
delay(1);
digitalWrite(step_pin, LOW);
delay(1);
}
StepperPosition=StepperPosition-StepsToTake;
}
if (!rotationdirection) { // Move motor CW
digitalWrite(dir_pin, LOW); // (HIGH = anti-clockwise / LOW = clockwise)
for (int x = 1; x < StepsToTake; x++) {
digitalWrite(step_pin, HIGH);
delay(1);
digitalWrite(step_pin, LOW);
delay(1);
}
StepperPosition=StepperPosition+StepsToTake;
}
}
}
Неактивний
Сторінки 1