Ви не увійшли.
- Теми: Активні | Без відповіді
#1 2016-09-22 23:39:27
- marov.a
- Учасник

- Зареєстрований: 2014-12-06
- Повідомлень: 31
Управление PWM в определенном алгоритме
Помогите,пожалуйста,советом или предложением. Не могу связать в кучу несколько функций. Описание на фото, я думаю в графическом виде более наглядно.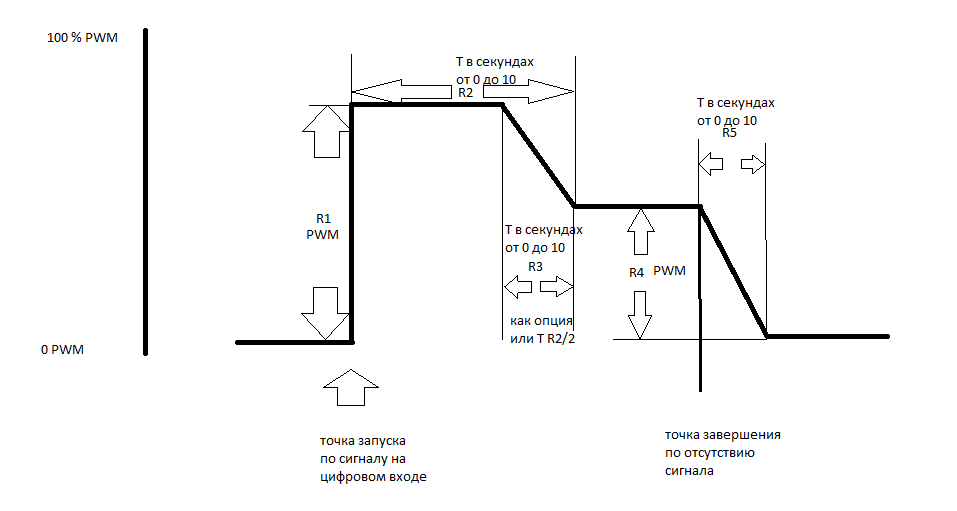
R-потенциометры на аналоговых входах
Сигнал запуска на любом цифровом
PWM- один выход.
Неактивний
#5 2016-09-23 09:11:29
- NoName
- Customer
- З Київ
- Зареєстрований: 2014-07-08
- Повідомлень: 1,446
Re: Управление PWM в определенном алгоритме
vvr, я думаю что он хочет алгоритм и код
R1-R5 крутилки для коррекции характеристик сигнала )
marov.a, если сами не хочете делать закажите юному дарованию что "скетчь $" пишет )
или мне за какую то плюшку с магазина ), но макет давайте сами соберете, а то плюшек в магазине ( http://arduino-ua.com/ ) не хватит )
вот только характеристики PWM не указаны, может ему нужен 32битный )
Неактивний
#6 2016-09-23 13:05:18
- marov.a
- Учасник
- Зареєстрований: 2014-12-06
- Повідомлень: 31
Re: Управление PWM в определенном алгоритме
Визуализация- расположение потенциометров. У меня не получается связать в кучу считывание показаний потенциометров с выполнением процесса. ШИМ стандартный 0-255, макет я сам соберу, все равно его придется внедрять в уже существующие рамки силовой части. Я не прошу сделать все за меня бесплатно))))Приятное и плодотворное сотрудничество всегда более плодоносное)))
Неактивний
#7 2016-09-23 13:12:09
- NoName
- Customer
- З Київ
- Зареєстрований: 2014-07-08
- Повідомлень: 1,446
Re: Управление PWM в определенном алгоритме
у Вас 4 state work и один wait , условно
state 2, 4 расчетные
давайте я Вам вечером напишу основу, проверите сами.
в дар приму что то из инструментов, по результатам работы )
объясните точку завершения, не понял
Остання редакція NoName (2016-09-23 13:14:12)
Неактивний
#11 2016-09-23 17:26:09
- qwone
- Учасник
- Зареєстрований: 2016-07-25
- Повідомлень: 143
Re: Управление PWM в определенном алгоритме
Лучше и проще решать такую задачу в 2 вычислительных потока. 1 - поток задаваемая функция, 2 сьем информации с потенциометров и перевод в переменные.
Вот примерно шаблон для создания такой программы.
ПС: Пока мешать не буду вашему творчеству своим кодом.
//#1
void setup1(){
}
void loop1(){
}
//#2
void setup2(){
}
void loop2(){
}
//#3
void setup3(){
}
void loop3(){
}
void setup() {
//#1
setup1();
//#2
setup2();
//#3
setup3();
}
void loop() {
static uint32_t MILLIS ;
MILLIS = millis() ;
//#1 1000 миллисекунд вычислит. поток 1
static uint32_t future1 = 0 ;
if (MILLIS>=future1) {
future1 = MILLIS + 1000 ;
loop1();
MILLIS = millis() ;
}
//#2 200 миллисекунд вычислит. поток 2
static uint32_t future2 = 0 ;
if (MILLIS>=future2) {
future2 = MILLIS + 200 ;
loop2();
MILLIS = millis() ;
}
//#3 100 миллисекунд вычислит. поток 3
static uint32_t future3 = 0 ;
if (MILLIS>=future3) {
future3 = MILLIS + 100 ;
loop3();
}
}Остання редакція qwone (2016-09-23 17:28:13)
Неактивний
#13 2016-09-23 20:22:57
- marov.a
- Учасник
- Зареєстрований: 2014-12-06
- Повідомлень: 31
Re: Управление PWM в определенном алгоритме
Есть точка начала- на вход поступает 1...начинается цикл TR2 по окончанию которого шим переходит в режим R4 и длится до переключения входа с 1 до 0( не регламентировано по времени). При появлении 0-я выполняется цикл TR5. Как правильно задал вопрос NoName- не зависимо от этапа выполнения, если появляется 0, выполняется TR2 с размерности шим присутствующей в данный момент до 0.
Неактивний
#17 2016-09-23 21:43:16
- marov.a
- Учасник
- Зареєстрований: 2014-12-06
- Повідомлень: 31
Re: Управление PWM в определенном алгоритме
у меня Leonardo пока пишет так
Arduino: 1.6.11 (Windows 10), TD: 1.30, Плата:"Arduino Leonardo"
C:\Users\Администратор\Desktop\sketch_sep23a\sketch_sep23a.ino:13:19: fatal error: Timer.h: No such file or directory
compilation terminated.
exit status 1
Ошибка компиляции для платы Arduino Leonardo.
Неактивний
#18 2016-09-23 21:50:38
- NoName
- Customer
- З Київ
- Зареєстрований: 2014-07-08
- Повідомлень: 1,446
Re: Управление PWM в определенном алгоритме
http://www.doctormonk.com/2012/01/ardui … brary.html
я сам пока не смотрел, да и проверить не на чем,
потому сами.
пока посмотрите код, время работы таска не реализовано,но то ет мелочи, основу посмотрите, все понятно?
Неактивний
#19 2016-09-23 22:04:53
- marov.a
- Учасник
- Зареєстрований: 2014-12-06
- Повідомлень: 31
Re: Управление PWM в определенном алгоритме
спс, подгрузил библиотеку, компилировал, загрузил....сейчас разбираю.
typedef enum {
R1 = A0,
R2 = A1,
R3 = A2,
R4 = A3,
R5 = A4,
} TE_IO_NAME;
and
// potentiometer wiper (middle terminal) connected to digital pin
int input_array_pin[] = {3,3,3,3,3};
int out_pwm_pin = 13;
int digi_start_pin = 8;
Неактивний
#20 2016-09-23 22:05:21
- qwone
- Учасник
- Зареєстрований: 2016-07-25
- Повідомлень: 143
Re: Управление PWM в определенном алгоритме
у меня Leonardo пока пишет так
C:\Users\Администратор\Desktop\sketch_sep23a\sketch_sep23a.ino:13:19: fatal error: Timer.h: No such file or directory
Пишет что надо поставить библиотеку в систему. И кроме вас никто не сможет это сделать. Потому что надо руками.
Эскиз ->include library -> menage libraries ну и там ищи .
Неактивний
#21 2016-09-23 22:14:04
- marov.a
- Учасник
- Зареєстрований: 2014-12-06
- Повідомлень: 31
Re: Управление PWM в определенном алгоритме
marov.a пише:у меня Leonardo пока пишет так
C:\Users\Администратор\Desktop\sketch_sep23a\sketch_sep23a.ino:13:19: fatal error: Timer.h: No such file or directory
Пишет что надо поставить библиотеку в систему. И кроме вас никто не сможет это сделать. Потому что надо руками.
Эскиз ->include library -> menage libraries ну и там ищи .
Уже поставил спс...
Неактивний
#23 2016-09-24 13:34:13
- NoName
- Customer
- З Київ
- Зареєстрований: 2014-07-08
- Повідомлень: 1,446
Re: Управление PWM в определенном алгоритме
код немного сложноват для блокнота (((
убрал таймер (, я думал что ето системная либа
код "на посмотреть" удалил, там явно не дописано
в общем посмотрите, а то я не уверен что все там работает ), блокировки защитные позже допишу
этот кусок Вы правите под себя
int input_array_pin[] = { 4,6,8,9,10 };
int out_pwm_pin = 3;
int digi_start_pin = 12;
del
обновленная версия ниже
Остання редакція NoName (2016-09-26 21:04:15)
Неактивний
#24 2016-09-24 14:16:52
- marov.a
- Учасник
- Зареєстрований: 2014-12-06
- Повідомлень: 31
Re: Управление PWM в определенном алгоритме
pinMode (out_pwm_pin, OUTPUT); // sets the pin as output
pinMode (LED_PIN_DEMO, OUTPUT); // sets the pin as output
??? set_new_pwm ( 0 ); // disable pwm
здесь чего то не хватает? компилятор ругается
Неактивний
#25 2016-09-24 17:10:33
- NoName
- Customer
- З Київ
- Зареєстрований: 2014-07-08
- Повідомлень: 1,446
Re: Управление PWM в определенном алгоритме
поставил
arduino leonardo
Sketch uses 7,408 bytes (25%) of program storage space. Maximum is 28,672 bytes.
Global variables use 286 bytes (11%) of dynamic memory, leaving 2,274 bytes for local variables. Maximum is 2,560 bytes.
пробуйте
/*
* ----------------------------------------------------------------------------
* "THE BEER-WARE LICENSE" (Revision 00):
* <devgate.info эт gmail.com> wrote this file. As long as you retain this notice you
* can do whatever you want with this stuff. If we meet some day, and you think
* this stuff is worth it, you can buy me a beer or device ( arduino-ua.com ) in return.
* Chingiz Sunlucid
* ----------------------------------------------------------------------------
* Date : 2016.09.24
* ----------------------------------------------------------------------------
*/
// ARDUINO PIN CONFIG
// for example
// Arduino leonardo
/*
Input and Output
Each of the 20 digital i/o pins on the Leonardo can be used as an input or output, using pinMode(), digitalWrite(), and digitalRead() functions. They operate at 5 volts. Each pin can provide or receive a maximum of 40 mA and has an internal pull-up resistor (disconnected by default) of 20-50 kOhms. In addition, some pins have specialized functions:
Serial: 0 (RX) and 1 (TX). Used to receive (RX) and transmit (TX) TTL serial data using the ATmega32U4 hardware serial capability. Note that on the Leonardo, the Serial class refers to USB (CDC) communication; for TTL serial on pins 0 and 1, use the Serial1 class.
TWI: 2 (SDA) and 3 (SCL). Support TWI communication using the Wire library.
External Interrupts: 3 (interrupt 0), 2 (interrupt 1), 0 (interrupt 2), 1 (interrupt 3) and 7 (interrupt 4). These pins can be configured to trigger an interrupt on a low value, a rising or falling edge, or a change in value. See the attachInterrupt() function for details.
PWM: 3, 5, 6, 9, 10, 11, and 13. Provide 8-bit PWM output with the analogWrite() function.
SPI: on the ICSP header. These pins support SPI communication using the SPI library. Note that the SPI pins are not connected to any of the digital I/O pins as they are on the Uno, They are only available on the ICSP connector. This means that if you have a shield that uses SPI, but does NOT have a 6-pin ICSP connector that connects to the Leonardo's 6-pin ICSP header, the shield will not work.
LED: 13. There is a built-in LED connected to digital pin 13. When the pin is HIGH value, the LED is on, when the pin is LOW, it's off.
Analog Inputs: A0-A5, A6 - A11 (on digital pins 4, 6, 8, 9, 10, and 12). The Leonardo has 12 analog inputs, labeled A0 through A11, all of which can also be used as digital i/o. Pins A0-A5 appear in the same locations as on the Uno; inputs A6-A11 are on digital i/o pins 4, 6, 8, 9, 10, and 12 respectively. Each analog input provide 10 bits of resolution (i.e. 1024 different values). By default the analog inputs measure from ground to 5 volts, though is it possible to change the upper end of their range using the AREF pin and the analogReference() function.
There are a couple of other pins on the board:
AREF. Reference voltage for the analog inputs. Used with analogReference().
Reset. Bring this line LOW to reset the microcontroller. Typically used to add a reset button to shields which block the one on the board.
*/
// potentiometer wiper (middle terminal) connected to analog pin
//int input_array_pin[] = { A0,A1,A2,A3,A4 };
int input_array_pin[] = { 4,6,8,9,10 };
int out_pwm_pin = 3;
int digi_start_pin = 12;
int LED_PIN_DEMO = 13; /* use PWM, for control */
// 8 bit PWM
#define MAX_RESOLUTION_PWM 0xFF
// 16 bit PWM
// #define MAX_RESOLUTION_PWM 0xFFFF
typedef enum { // enum name task
ST_WAIT = 0,
ST_TIME_R2 = 1,
ST_TIME_R3 = 2,
ST_PWM_R4 = 3,
ST_TIME_R5 = 4,
}TE_STATE;
typedef enum {
TIMER_EXE = 0,
TIMER_DISABLED = 1,
TIMER_RUN = 2,
}TE_TIMER;
typedef enum { // noedit, name ( mem data sarray )
R1 = 0,
R2 = 1,
R3 = 2,
R4 = 3,
R5 = 4,
} TE_IO_NAME;
#define BIT(x) (1 << (x))
#define CHECKBIT(x,b) (x&(b))
#define SETBIT(x,b) x|=(b)
#define CLEARBIT(x,b) x&=~(b)
#define TOGGLEBIT(x,b) x^=(b)
#define count_element_array(x) sizeof(x)/sizeof(x[0])
#define DEBUG
#define DEBUG_PWM
#define DEBOUNCE_TIME 100
#define TASK_PROCESS_TIME 10
// uncomment for disable debug info, or delete line #define DEBUG
// #undef DEBUG
typedef struct {
unsigned long time_unit[5];
unsigned short pwm_unit [5];
unsigned short current_pwm; // for 16bit pwm chip
unsigned long time_start_key_press;
unsigned long time_start_key_un_press;
uint16_t key_status;
TE_STATE state;
} td_system;
typedef struct { // float not optimal, easy code
float pwm_start;
float pwm_end;
float pwm_delta;
unsigned long count_step;
} td_temp_falling;
td_system system_demo_pwm;
td_temp_falling temp_falling;
unsigned long get_value_from_percent ( unsigned long percent, unsigned long max_value );
unsigned long get_percent_from_value ( unsigned long xxx, unsigned long max_value );
void set_new_pwm ( unsigned short data );
void prepare_new_state ( TE_STATE new_state );
void decode_input_data ( void );
void manual_stop_system ( void );
TE_TIMER programm_count_down_uint16 ( unsigned short *timer , unsigned char shift );
TE_TIMER programm_count_down_uint32 ( unsigned long *timer , unsigned long shift );
TE_TIMER system_delay_uint32 ( unsigned long *timer , unsigned long shift );
void key_function ( void );
void event_task();
void get_analog_config_system (void);
// R1 - value PWM1 ( pwm_unit[0] )
// R2 - state1 time ( 0..10 sec ), PWM1 ( pwm_unit[1] )
// R3 - state2 time ( 0..10 sec ) ( pwm_unit[2] )
// R4 - state3 value PWM2 ( pwm_unit[3] )
// R5 - state4 time ( 0..10 sec ) ( pwm_unit[4] )
//---------------------------------------------------
int in_r_value[count_element_array(input_array_pin)]; // variable to store the value read
//---------------------------------------------------
// funtion provide hw setup system demo pwm.
void setup()
{
int foo;
system_demo_pwm.time_start_key_press = DEBOUNCE_TIME;
system_demo_pwm.time_start_key_un_press = DEBOUNCE_TIME;
for ( foo = 0; foo < count_element_array(input_array_pin); foo ++ )
{
// set mode pin input
}
pinMode (out_pwm_pin, OUTPUT); // sets the pin as output
pinMode (LED_PIN_DEMO, OUTPUT); // sets the pin as output
set_new_pwm ( 0 ); // disable pwm
pinMode (digi_start_pin, INPUT); // sets the pin as input
Serial.begin(9600); // setup serial
}
unsigned long get_value_from_percent ( unsigned long percent, unsigned long max_value )
{
unsigned long ret;
// max_value - 100 %
// x percent
ret = (unsigned long)((unsigned long)max_value*(unsigned long)percent)/(unsigned long)100;
return (ret);
}
unsigned long get_percent_from_value ( unsigned long xxx, unsigned long max_value )
{
unsigned long ret;
// max_value - 100 %
// xxx percent
ret = (unsigned long)((unsigned long)xxx*(unsigned long)100/(unsigned long)max_value);
return (ret);
}
void set_new_pwm ( unsigned short data )
{
#ifdef DEBUG_PWM
static unsigned short old_pwm = 0xFFFF;
if ( data != old_pwm )
{
Serial.print("pwm: "); Serial.println(data);
data = old_pwm;
}
#endif
system_demo_pwm.current_pwm = data;
analogWrite ( out_pwm_pin, data );
#ifdef DEBUG
analogWrite ( LED_PIN_DEMO, data );
#endif
}
void prepare_new_state ( TE_STATE new_state )
{
#ifdef DEBUG
Serial.print("set new state "); Serial.println(new_state);
#endif
// system_demo_pwm.pwm_unit [R1];
//
system_demo_pwm.time_unit [R2];
// system_demo_pwm.time_unit [R3];
// system_demo_pwm.pwm_unit [R4];
// system_demo_pwm.time_unit [R5];
switch ( new_state )
{
case ST_WAIT : // disable all
set_new_pwm ( 0 );
break;
case ST_TIME_R2 : // start
set_new_pwm ( system_demo_pwm.pwm_unit[R1] );
temp_falling.pwm_start = system_demo_pwm.pwm_unit[R1];
temp_falling.pwm_end = system_demo_pwm.pwm_unit[R1];
temp_falling.pwm_delta = 0;
break;
case ST_TIME_R3 : // falling
set_new_pwm ( system_demo_pwm.pwm_unit[R1] );
temp_falling.count_step = system_demo_pwm.time_unit[R3] / TASK_PROCESS_TIME;
temp_falling.pwm_start = system_demo_pwm.pwm_unit[R1];
temp_falling.pwm_end = system_demo_pwm.pwm_unit[R4];
temp_falling.pwm_delta = (temp_falling.pwm_start - temp_falling.pwm_end ) / (float)temp_falling.count_step;
break;
case ST_PWM_R4: // line
set_new_pwm ( system_demo_pwm.pwm_unit[R3] );
break;
case ST_TIME_R5:
set_new_pwm ( system_demo_pwm.current_pwm );
temp_falling.count_step = system_demo_pwm.time_unit[R5] / TASK_PROCESS_TIME;
temp_falling.pwm_start = system_demo_pwm.current_pwm;
temp_falling.pwm_end = 0;
temp_falling.pwm_delta = temp_falling.pwm_start / (float)temp_falling.count_step;
break;
}
system_demo_pwm.state = new_state;
}
//-------------------------------------------------------
void decode_input_data ( void )
{
int foo;
// R1 (0-1024) value PWM1
unsigned long ui_temp;
// get pwm1
ui_temp = get_percent_from_value( input_array_pin[0],1024 );
system_demo_pwm.pwm_unit[R1] = get_value_from_percent( ui_temp, MAX_RESOLUTION_PWM );
// get time1 R2
ui_temp = get_percent_from_value( input_array_pin[1],1024 );
system_demo_pwm.time_unit[R2] = get_value_from_percent( ui_temp,10000 ); // 10 sec
// get time2 R3
ui_temp = get_percent_from_value( input_array_pin[2],1024 );
system_demo_pwm.time_unit[R3] = get_value_from_percent( ui_temp,10000 ); // 10 sec
// disable incorrect time setting
if ( (system_demo_pwm.time_unit[R2] + system_demo_pwm.time_unit[R3]) > 10000 )
system_demo_pwm.time_unit[R3] = system_demo_pwm.time_unit[R3] / 2;
// get pwm R4
ui_temp = get_percent_from_value( input_array_pin[3],1024 );
system_demo_pwm.pwm_unit[R4] = get_value_from_percent( ui_temp,MAX_RESOLUTION_PWM );
// get time R5
ui_temp = get_percent_from_value( input_array_pin[4],1024 );
system_demo_pwm.time_unit[R5] = get_value_from_percent( ui_temp,10000 ); // 10 sec
#ifdef DEBUG
for ( foo = 0; foo < 4; foo ++ )
{
Serial.print("time_unit["); Serial.print(foo); Serial.print("] = ");
Serial.println(system_demo_pwm.time_unit[foo]);
}
for ( foo = 0; foo < 4; foo ++ )
{
Serial.print("pwm_unit["); Serial.print(foo); Serial.print("] = ");
Serial.println(system_demo_pwm.pwm_unit[foo]);
}
#endif
}
void manual_stop_system ( void )
{
prepare_new_state (ST_TIME_R5);
#ifdef DEBUG
int foo = ST_TIME_R5;
Serial.print("time_unit["); Serial.print(foo); Serial.print("] = ");
Serial.println(system_demo_pwm.time_unit[foo]);
Serial.print("pwm_unit["); Serial.print(foo); Serial.print("] = ");
Serial.println(system_demo_pwm.pwm_unit[foo]);
#endif
}
TE_TIMER programm_count_down_uint16 ( unsigned short *timer , unsigned char shift )
{
if (*timer > 0 )
{
if (*timer > shift )
{
*timer -= shift;
return TIMER_RUN;
}
else
{
*timer = 0;
return TIMER_EXE;
}
}
return TIMER_DISABLED;
}
TE_TIMER programm_count_down_uint32 ( unsigned long *timer , unsigned long shift )
{
if (*timer > 0 )
{
if (*timer > shift )
{
*timer -= shift;
return TIMER_RUN;
}
else
{
*timer = 0;
return TIMER_EXE;
}
}
return TIMER_DISABLED;
}
TE_TIMER system_delay_uint32 ( unsigned long *timer , unsigned long shift )
{
if ( *timer > 0 )
{
if (*timer > shift )
{
*timer -= shift;
return TIMER_RUN;
}
else
{ // save delta time
*timer = ( shift - *timer );
return TIMER_EXE;
}
}
return TIMER_DISABLED;
}
void key_function ( void )
{
TE_TIMER status;
if ( digitalRead(digi_start_pin))
{
status = programm_count_down_uint32 (&system_demo_pwm.time_start_key_press, TASK_PROCESS_TIME);
switch ( status )
{
case TIMER_EXE:
case TIMER_DISABLED:
system_demo_pwm.key_status = 1;
break;
}
} else {
system_demo_pwm.time_start_key_press = DEBOUNCE_TIME;
status = programm_count_down_uint32 (&system_demo_pwm.time_start_key_un_press, TASK_PROCESS_TIME);
switch ( status )
{
case TIMER_EXE:
case TIMER_DISABLED:
system_demo_pwm.key_status = 0;
break;
}
}
}
void event_task()
{
TE_TIMER status;
key_function ();
if ( system_demo_pwm.state == ST_WAIT ) return;
switch ( system_demo_pwm.state )
{
//----------------------------------------
case ST_TIME_R2:
status = programm_count_down_uint32 (&system_demo_pwm.time_unit[R2], TASK_PROCESS_TIME);
switch ( status )
{
case TIMER_EXE:
case TIMER_DISABLED:
prepare_new_state(ST_TIME_R3);
break;
case TIMER_RUN:
break;
}
break;
//----------------------------------------
case ST_TIME_R3:
status = programm_count_down_uint32 (&temp_falling.count_step, 1);
switch ( status )
{
case TIMER_EXE:
case TIMER_DISABLED:
prepare_new_state(ST_PWM_R4);
break;
case TIMER_RUN:
set_new_pwm ( system_demo_pwm.pwm_unit[1] );
programm_count_down_uint16 (&system_demo_pwm.pwm_unit[1], temp_falling.pwm_delta);
break;
}
break;
//----------------------------------------
case ST_PWM_R4:
// analogWrite(out_pwm_pin, system_demo_pwm.pwm_unit[R4])
break;
//----------------------------------------
case ST_TIME_R5:
status = programm_count_down_uint32 (&temp_falling.count_step, 1);
switch ( status )
{
case TIMER_EXE:
case TIMER_DISABLED:
prepare_new_state(ST_WAIT);
break;
case TIMER_RUN:
set_new_pwm ( system_demo_pwm.pwm_unit[4] );
programm_count_down_uint16 (&system_demo_pwm.pwm_unit[4], temp_falling.pwm_delta);
break;
}
break;
//----------------------------------------
}
}
void get_analog_config_system (void)
{
int foo;
for ( foo = 0; foo < count_element_array(input_array_pin); foo ++ )
{
in_r_value[foo] = analogRead ( input_array_pin[foo] ); // read the input pin
}
}
void loop()
{
static unsigned long task_time;
TE_TIMER status;
unsigned long delta_task_time;
if ( system_demo_pwm.state == ST_WAIT )
{
get_analog_config_system();
if ( system_demo_pwm.key_status ) prepare_new_state (1);
}
else
{
if ( system_demo_pwm.state != ST_TIME_R5 )
if ( !system_demo_pwm.key_status ) manual_stop_system();
}
delta_task_time = millis();
status = system_delay_uint32 ( task_time, delta_task_time );
switch ( status )
{
case TIMER_EXE:
case TIMER_DISABLED:
task_time += DEBOUNCE_TIME;
event_task();
break;
case TIMER_RUN:
break;
}
}Неактивний