Ви не увійшли.
- Теми: Активні | Без відповіді
Сторінки 1
#1 Re: Програмування Arduino » Arduino mega + e32 433t20d LoRa modul » 2023-10-20 14:43:25
Андр. пише:А ось коли натискаю кнопку то збивається передача даних
Спробуйте натискати цю ж кнопку, але в програмі опитувати якусь іншу, так відокремите - апаратна чи програмна проблема.
З цім розібрався, кнопки працюють все правильно, діло не в них. Тепер у мене інша проблема. Я передаю значення з ардуіно-1 на ардуіно-2 і все ОК, я зчитую данні з джойстика який стоїть на ардуіно-1. А ось я хочу налаштувати зворотній зв'язок, і тут проблема, не знаю чому перешукав багато туторіалів та коду і у мене не виходить відправити "ОК" з ардуіно-2 на ардуіно-1 коли кнопка натиснута. При цьому коли я відправляю sendMessage з ардуіно-2 то зависає передача в Serial port-у і приходиться його закрити і знов відкрити тоді все ок данні передавати відновлюються а ось меседж так і не приходить на ардуіно-1.
ось код нижче, може хтось з цим стикався та знає як вирішити?
#include <SPI.h>
#include <LoRa.h>
#include <Wire.h>
const int csPin = 52; // LoRa radio chip select
const int resetPin = 3; // LoRa radio reset
const int irqPin = 2; // change for your board; must be a hardware interrupt pin
byte msgCount = 0; // count of outgoing messages
byte localAddress = 0xBB; // address of this device
byte destination = 0xFF; // destination to send to
long lastSendTime = 0; // last send time
int interval = 50; // interval between sends
boolean flag1 = false;
int RLY1=2;
int Sensor1 = 0;
int relay1Status;
String outgoing; // outgoing message
String statusmessage = "";
void setup() {
Serial.begin(9600); // initialize serial
//LoRa.setPins(csPin, resetPin, irqPin);// set CS, reset, IRQ pin
pinMode(RLY1,OUTPUT);
Serial.println("LoRa Duplex");
if (!LoRa.begin(433E6)) { // initialize ratio at 915 MHz
Serial.println("LoRa init failed. Check your connections.");
while (true); // if failed, do nothing
}
Serial.println("LoRa init succeeded.");
}
void loop() {
if (millis() - lastSendTime > interval) {
relay1Status = digitalRead(RLY1);
lastSendTime = millis(); // timestamp the message
interval = random(50) + 100; // 2-3 seconds
}
onReceive(LoRa.parsePacket());
//LoRa.receive();
}
void sendMessage(String outgoing) {
LoRa.beginPacket(); // start packet
LoRa.write(destination); // add destination address
LoRa.write(localAddress); // add sender address
LoRa.write(msgCount); // add message ID
LoRa.write(outgoing.length()); // add payload length
LoRa.print(outgoing); // add payload
LoRa.endPacket(); // finish packet and send it
msgCount++; // increment message ID
}
void onReceive(int packetSize) {
if (packetSize == 0) return; // if there's no packet, return
// read packet header bytes:
int recipient = LoRa.read(); // recipient address
byte sender = LoRa.read(); // sender address
byte incomingMsgId = LoRa.read(); // incoming msg ID
byte incomingLength = LoRa.read(); // incoming msg length
String incoming = "";
while (LoRa.available()) {
incoming += (char)LoRa.read();
}
if (incomingLength != incoming.length()) { // check length for error
// Serial.println("error: message length does not match length");
;
return; // skip rest of function
}
// if the recipient isn't this device or broadcast,
if (recipient != localAddress && recipient != 0xFF) {
//Serial.println("This message is not for me.");
;
return; // skip rest of function
}
// if message is for this device, or broadcast, print details:
// Serial.println("Received from: 0x" + String(sender, HEX));
// Serial.println("Sent to: 0x" + String(recipient, HEX));
//Serial.println("Message ID: " + String(incomingMsgId));
// Serial.println("Message length: " + String(incomingLength));
Serial.println("Message: " + incoming);
//Serial.println("RSSI: " + String(LoRa.packetRssi()));
//Serial.println("Snr: " + String(LoRa.packetSnr()));
// Serial.println();
String q = getValue(incoming, ',', 0);
Sensor1 = q.toInt();
//Serial.println(Sensor1);
if((Sensor1 == 1)&&(flag1==false))
{
digitalWrite(RLY1,HIGH);
relay1Status = 1;
Serial.println("Relay 1 is turned on");
flag1=true;
}
if((Sensor1 == 0)&&(flag1 ==true))
{
digitalWrite(RLY1,LOW);
relay1Status = 0;
Serial.println("Relay 1 is turned off");
statusmessage = statusmessage + relay1Status;
sendMessage(statusmessage);
delay(1000);
flag1=false;
}
incoming = "";
//statusmessage = statusmessage + relay1Status + "," + relay2Status + "," + relay3Status + "," + relay4Status;
//sendMessage(statusmessage);
}
String getValue(String data, char separator, int index)
{
int found = 0;
int strIndex[] = { 0, -1 };
int maxIndex = data.length() - 1;
for (int i = 0; i <= maxIndex && found <= index; i++) {
if (data.charAt(i) == separator || i == maxIndex) {
found++;
strIndex[0] = strIndex[1] + 1;
strIndex[1] = (i == maxIndex) ? i+1 : i;
}
}
return found > index ? data.substring(strIndex[0], strIndex[1]) : "";
}#2 Програмування Arduino » Arduino mega + e32 433t20d LoRa modul » 2023-10-10 11:55:52
- Андр.
- відповідей: 2
Доброго всім дня! Потрібна допомога. Є дві плати ардуіно мега і два радіо модуля e32 433t20d LoRa. Передаю через них структуру даних. На платі ардуіно Send стоїть два джойстика та клавіатура і екран я передаю на плату Receive дані положення джойстиків і значення клавіатури та двох кнопок. Коли ні чого не роблю то все приходить норм без проблем. Як що змінюю положення джойстика то значення змінюються. А ось коли натискаю кнопку то збивається передача даних і не коректно показує дані потім і значення зміщаються. Прикладаю код двох плат та те що відбувається в порту. Може хтось може допомогти в цьому?
Send arduino (що посилає значення)
#include <Wire.h>
#include <Keypad.h>
#include <LiquidCrystal.h>
#include <SoftwareSerial.h>
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
#include "EBYTE.h"
#define PIN_RX 9
#define PIN_TX 8
#define PIN_M0 7
#define PIN_M1 6
#define PIN_AX 10
#define pinX_1 A0
#define pinY_1 A1
#define swPin_1 30
#define pinX_2 A2
#define pinY_2 A3
#define swPin_2 31
int buttonState = LOW;
int lastButtonState = LOW;
struct DATA {
char Key;
int X1_send;
int Y1_send;
int X2_send;
int Y2_send;
int swPin1_send;
int swPin2_send;
};
int Chan;
DATA MyData;
SoftwareSerial ESerial(PIN_RX, PIN_TX);
const byte ROWS = 4;
const byte COLS = 4;
char hexaKeys[ROWS][COLS] = {
{'D','C','B','A'},
{'#','9','6','3'},
{'0','8','5','2'},
{'*','7','4','1'}
};
byte rowPins[ROWS] = {25, 24, 23, 22};
byte colPins[COLS] = {29, 28, 27, 26};
Keypad customKeypad = Keypad( makeKeymap(hexaKeys), rowPins, colPins, ROWS, COLS);
EBYTE Transceiver(&ESerial, PIN_M0, PIN_M1, PIN_AX);
void setup(){
lcd.begin(16, 2);
Serial.begin(9600);
ESerial.begin(9600);
Transceiver.init();
pinMode(pinX_1, INPUT);
pinMode(pinY_1, INPUT);
pinMode(swPin_1, INPUT_PULLUP);
pinMode(pinX_2, INPUT);
pinMode(pinY_2, INPUT);
pinMode(swPin_2, INPUT_PULLUP);
lcd.setCursor(2, 0);
lcd.print("Browning");
lcd.setCursor(4, 1);
lcd.print("Ver.:1.1");
lcd.clear();
//Transceiver.PrintParameters();
}
void loop(){
Keypad_mod();
analog_joy();
Send_message();
Transceiver.SendStruct(&MyData, sizeof(MyData));
}
void Keypad_mod(){
char customKey = customKeypad.getKey();
if (customKey){
MyData.Key = customKey;
lcd.begin(16, 2);
lcd.setCursor(0, 0);
lcd.print(customKey);
//lcd.print(" ");
//Serial.println(customKey);
}
//Serial.print("Key: "); Serial.print(MyData.Key);
}
void analog_joy(){
int X1 = analogRead(pinX_1); // считываем значение оси Х
int Y1 = analogRead(pinY_1);
int X2 = analogRead(pinX_2); // считываем значение оси Х
int Y2 = analogRead(pinY_2);
int X1_Analog = map(X1, 516, 1023, 0, 100);
int Y1_Analog = map(Y1, 510, 1023, 0, 100);
int X2_Analog = map(X2, 510, 1023, 0, 100);
int Y2_Analog = map(Y2, 510, 1023, 0, 100);
int State_swPin1 = digitalRead(swPin_1);
int State_swPin2 = digitalRead(swPin_2);
lcd.setCursor(0, 0);
lcd.print("X1:");
lcd.setCursor(3, 0);
lcd.print(X1_Analog);
lcd.print(" ");
lcd.setCursor(0, 1);
lcd.print("Y1:");
lcd.setCursor(3, 1);
lcd.print(Y1_Analog);
lcd.print(" ");
lcd.setCursor(7, 0);
lcd.print("X2:");
lcd.setCursor(10, 0);
lcd.print(X2_Analog);
lcd.print(" ");
lcd.setCursor(7, 1);
lcd.print("Y2:");
lcd.setCursor(10, 1);
lcd.print(Y2_Analog);
lcd.print(" ");
lcd.setCursor(13, 0);
lcd.print("B:");
lcd.setCursor(15, 0);
lcd.print(State_swPin1);
lcd.print(" ");
lcd.setCursor(13, 1);
lcd.print("B:");
lcd.setCursor(15, 1);
lcd.print(State_swPin2);
lcd.print(" ");
//Serial.println(Y2);
}
void Send_message(){
int X1 = analogRead(pinX_1); // считываем значение оси Х
int Y1 = analogRead(pinY_1);
int X2 = analogRead(pinX_2); // считываем значение оси Х
int Y2 = analogRead(pinY_2);
int State_swPin1 = digitalRead(swPin_1);
int State_swPin2 = digitalRead(swPin_2);
MyData.X1_send = analogRead(pinX_1);
MyData.Y1_send = analogRead(pinY_1);
MyData.X2_send = analogRead(pinX_2);
MyData.Y2_send = analogRead(pinY_2);
MyData.swPin1_send = digitalRead(swPin_1);
MyData.swPin2_send = digitalRead(swPin_2);
/* //Serial.print("Key: "); Serial.print(MyData.Key);
Serial.print(" X1: "); Serial.print(MyData.X1_send);
Serial.print(" Y1: "); Serial.print(MyData.Y1_send);
Serial.print(" X2: "); Serial.print(MyData.X2_send);
Serial.print(" Y2: "); Serial.print(MyData.Y2_send);
Serial.print(" swPin1_send: "); Serial.print(MyData.swPin1_send);
Serial.print(" swPin2_send: "); Serial.println(MyData.swPin2_send); */
}Receive Arduino (що приймає значення)
#include <AccelStepper.h>
#include <SoftwareSerial.h>
#include "EBYTE.h"
const int stepPin = 9;
const int directionPin = 8;
const int enablePin = 7;
const int SPEED = 1000;
const int setSPEED = 1000;
#define PIN_RX 53
#define PIN_TX 52
#define PIN_M0 51
#define PIN_M1 50
#define PIN_AX 48
// i recommend putting this code in a .h file and including it
// from both the receiver and sender modules
struct DATA {
char Key;
int X1_send;
int Y1_send;
int X2_send;
int Y2_send;
int swPin1_send;
int swPin2_send;
};
int Chan;
DATA MyData;
unsigned long Last;
// connect to any digital pin to connect to the serial port
// don't use pin 01 and 1 as they are reserved for USB communications
SoftwareSerial ESerial(PIN_RX, PIN_TX);
// create the transceiver object, passing in the serial and pins
EBYTE Transceiver(&ESerial, PIN_M0, PIN_M1, PIN_AX);
AccelStepper stepper(AccelStepper::DRIVER, stepPin, directionPin);
void setup() {
Serial.begin(9600);
stepper.setEnablePin(enablePin);
stepper.enableOutputs();
stepper.setMaxSpeed(SPEED);
//stepper.setAcceleration(1000);
stepper.setSpeed(SPEED);
ESerial.begin(9600);
Transceiver.init();
}
void loop() {
Read_arduinoMega();
X1_left_rigth_state();
//MoveConerLeft ();
MoveConerRigth ();
}
void X1_left_rigth_state(){
int X1_left_rigth;
X1_left_rigth = map(MyData.X1_send, 516, 1023, 0, 100);
//Serial.println(X1_left_rigth);
if (X1_left_rigth >= 20){
stepper.setSpeed(setSPEED);
stepper.runSpeed();
}else if(X1_left_rigth <= -20){
stepper.setSpeed(-setSPEED);
stepper.runSpeed();
}else {
stepper.setSpeed(0);
stepper.stop();
}
//Serial.println(MyData.swPin2_send);
}
void MoveConerLeft (){
int ButtonStateConer = MyData.swPin1_send;
if (ButtonStateConer == LOW){
int setSPEED = 3000;
stepper.setSpeed(setSPEED);
stepper.setAcceleration(3000);
stepper.runToNewPosition(1000);
stepper.run();
//Serial.println(ButtonStateConer);
}
else if (ButtonStateConer == HIGH){
stepper.setCurrentPosition(0);
stepper.setSpeed(0);
//Serial.println(ButtonStateConer);
}
//stepper.run();
}
void MoveConerRigth (){
//int ButtonStateConer2 = MyData.swPin2_send;
if (MyData.swPin2_send == 0){
int setSPEED = 3000;
stepper.setSpeed(-setSPEED);
stepper.setAcceleration(3000);
stepper.runToNewPosition(-1000);
stepper.run();
//Serial.println(ButtonStateConer2);
}
else if (MyData.swPin2_send == 1){
stepper.setCurrentPosition(0);
stepper.setSpeed(0);
//Serial.println(ButtonStateConer2);
}
//Serial.println(MyData.Key);
}
void Read_arduinoMega(){
if (ESerial.available()) {
Transceiver.GetStruct(&MyData, sizeof(MyData));
//ESerial.readBytes((uint8_t*)& MyData, (uint8_t) sizeof(MyData));
Serial.print("Key: "); Serial.print(MyData.Key);
Serial.print(" X1: "); Serial.print(MyData.X1_send);
Serial.print(" Y1: "); Serial.print(MyData.Y1_send);
Serial.print(" X2: "); Serial.print(MyData.X2_send);
Serial.print(" Y2: "); Serial.print(MyData.Y2_send);
Serial.print(" swPin1_send: "); Serial.print(MyData.swPin1_send);
Serial.print(" swPin2_send: "); Serial.println(MyData.swPin2_send);
Last = millis();
}
else {
if ((millis() - Last) > 300) {
//Serial.println("Searching: ");
Last = millis();
}
}
}і ось що приходить в Serial port:
Key: # X1: 520 Y1: 510 X2: 506 Y2: 509 swPin1_send: 1 swPin2_send: 1
Key: # X1: 519 Y1: 511 X2: 506 Y2: 509 swPin1_send: 1 swPin2_send: 0 // натиснув кнопку
Key: # X1: 520 Y1: 511 X2: 505 Y2: 510 swPin1_send: 1 swPin2_send: 1
Key: # X1: 519 Y1: 511 X2: 506 Y2: 509 swPin1_send: 1 swPin2_send: 1
Key: # X1: 519 Y1: 511 X2: 506 Y2: 509 swPin1_send: 1 swPin2_send: 1
Key: # X1: 520 Y1: 511 X2: 506 Y2: 510 swPin1_send: 1 swPin2_send: 1
Key: # X1: 520 Y1: 510 X2: 505 Y2: 510 swPin1_send: 1 swPin2_send: 1827 // і потім щось пішло не так
Key: X1: 511 Y1: 505 X2: 509 Y2: 1 swPin1_send: 1 swPin2_send: 2083
Key: X1: 511 Y1: 506 X2: 510 Y2: 1 swPin1_send: 1 swPin2_send: 2083
Key: X1: 511 Y1: 505 X2: 510 Y2: 1 swPin1_send: 1 swPin2_send: 2083
Key: X1: 511 Y1: 506 X2: 509 Y2: 1 swPin1_send: 1 swPin2_send: 2083
Key: X1: 511 Y1: 505 X2: 509 Y2: 1 swPin1_send: 1 swPin2_send: 2083
Key: X1: 511 Y1: 506 X2: 510 Y2: 1 swPin1_send: 1 swPin2_send: 1827Як можна вирішити це питання? Щось з struct DATA, а як вирішити це поки не розумію.
#3 Re: Проекти » Arduino для музикантів » 2023-04-14 14:44:22
В часи, коли ще не знав про мікроконтролери, користувався програмкою під лінукс xoscope, сигнал вона отримує з аудіовходу PC/ноутбука, а щоб зробити високоімпедансний вхід "социлографа", використав операційний підсилювач. Якщо цікаво, можу знайти цю плату і викласти схему. З цією ж платою використовував програмку baudline, вона малює спектральну інтенсивність сигнулу в часі, для музикантів може бути цікавою.
Так цікаво, цікаво було б глянути.
#4 Re: Проекти » Arduino для музикантів » 2023-04-14 11:58:16
Зібрав міні осцилограф на платі Arduino Nano
https://www.youtube.com/watch?v=jCp75MIvQ7g
Можна провіряти сигнал
#5 Апаратні питання » USB Host Shield 2.0 -Stepper motor та Thrustmaster USB Joystick » 2022-09-30 16:31:41
- Андр.
- відповідей: 0
Всім привіт потрібна допомога, не можу розібратись з кодом
Є Arduino Mega та USB Host Shield 2.0 я підключив джойстик (Thrustmaster USB Joystick)
залив скетч з рідної бібліотеки USB Host Shield 2.0 (USBHIDJoystick)
За допомогою джойстика хочу керувати шаговим двигуном (підключений через драйвер).
Проблема полягає в тому що коли я переміщаю ручку джойстика в ліва або в право то двигун працює тільки коли змінюються положення джойстика, коли значення не змінні то двигун не рухається, але значення змінились
Без USB Host Shield 2.0 двигун працює, я назначив на кнопки на клавіатурі, але коли підключив USB Host Shield 2.0 то дуже повільно по кроково і стоїть на місці.
USBHIDJoystick
#include <usbhid.h>
#include <hiduniversal.h>
#include <usbhub.h>
// Satisfy IDE, which only needs to see the include statment in the ino.
#ifdef dobogusinclude
#include <spi4teensy3.h>
#endif
#include <SPI.h>
#include "hidjoystickrptparser.h"
USB Usb;
USBHub Hub(&Usb);
HIDUniversal Hid(&Usb);
JoystickEvents JoyEvents;
JoystickReportParser Joy(&JoyEvents);
void setup() {
Serial.begin(19200);
#if !defined(__MIPSEL__)
while (!Serial); // Wait for serial port to connect - used on Leonardo, Teensy and other boards with built-in USB CDC serial connection
#endif
Serial.println("Start");
if (Usb.Init() == -1)
Serial.println("OSC did not start.");
delay(200);
if (!Hid.SetReportParser(0, &Joy))
ErrorMessage<uint8_t > (PSTR("SetReportParser"), 1);
}
void loop() {
Usb.Task();
}hidjoystickrptparser.cpp
#include "hidjoystickrptparser.h"
#include <AccelStepper.h>
const int PUL = 7;
const int DIR = 6;
const int ENA = 5;
const int SPEED = 6400;
const int setSPEED = 2000;
AccelStepper stepper(AccelStepper::DRIVER, PUL, DIR);
JoystickReportParser::JoystickReportParser(JoystickEvents *evt) :
joyEvents(evt),
oldHat(0xDE),
oldButtons(0) {
for (uint8_t i = 0; i < RPT_GEMEPAD_LEN; i++)
oldPad[i] = 0xD;
}
void JoystickReportParser::Parse(USBHID *hid, bool is_rpt_id, uint8_t len, uint8_t *buf) {
bool match = true;
// Checking if there are changes in report since the method was last called
for (uint8_t i = 0; i < RPT_GEMEPAD_LEN; i++)
if (buf[i] != oldPad[i]) {
match = false;
break;
}
// Calling Game Pad event handler
if (!match && joyEvents) {
joyEvents->OnGamePadChanged((const GamePadEventData*)buf);
for (uint8_t i = 0; i < RPT_GEMEPAD_LEN; i++)oldPad[i] = buf[i];
}
uint8_t hat = (buf[5] & 0xF);
// Calling Hat Switch event handler
if (hat != oldHat && joyEvents) {
joyEvents->OnHatSwitch(hat);
oldHat = hat;
}
uint16_t buttons = (0x0000 | buf[6]);
buttons <<= 4;
buttons |= (buf[5] >> 4);
uint16_t changes = (buttons ^ oldButtons);
// Calling Button Event Handler for every button changed
if (changes) {
for (uint8_t i = 0; i < 0x0C; i++) {
uint16_t mask = (0x0001 << i);
if (((mask & changes) > 0) && joyEvents) {
if ((buttons & mask) > 0)
joyEvents->OnButtonDn(i + 1);
else
joyEvents->OnButtonUp(i + 1);
}
}
oldButtons = buttons;
}
}
void JoystickEvents::OnGamePadChanged(const GamePadEventData *evt) {
stepper.setEnablePin(ENA);
stepper.enableOutputs();
stepper.setMaxSpeed(SPEED);
stepper.setAcceleration(1500);
uint8_t X1 = evt->X;
uint8_t Y1 = evt->Y;
int setSPEED;
if((X1 >= 128)&&(X1 <= 251)){
setSPEED = map(X1, 251, 128, -5, -500);
stepper.setSpeed(setSPEED);
}
if((X1 >= 4)&&(X1 <= 127)){
setSPEED = map(X1, 4, 127, 5, 500);
stepper.setSpeed(setSPEED);
}
if((X1 > 251)||(X1 < 4)){
setSPEED = 0;
stepper.setSpeed(setSPEED);
}
/*Serial.print("tY1: ");
Serial.print(evt->Y, DEC);
Serial.print("tX2: ");
Serial.print(evt->Z1, DEC);
Serial.print("tY2: ");
Serial.print(evt->Z2, DEC);
Serial.print("tRz: ");
Serial.print(evt->Rz, DEC);
Serial.println("");
*/
stepper.runSpeed();
}
void JoystickEvents::OnHatSwitch(uint8_t hat) {
Serial.print("Hat Switch: ");
PrintHex<uint8_t > (hat, 0x80);
Serial.println("");
}
void JoystickEvents::OnButtonUp(uint8_t but_id) {
Serial.print("Up: ");
Serial.println(but_id, DEC);
}
void JoystickEvents::OnButtonDn(uint8_t but_id) {
Serial.print("Dn: ");
Serial.println(but_id, DEC);
}hidjoystickrptparser.h
#if !defined(__HIDJOYSTICKRPTPARSER_H__)
#define __HIDJOYSTICKRPTPARSER_H__
#include <usbhid.h>
struct GamePadEventData {
uint8_t X, Y, Z1, Z2, Rz;
};
class JoystickEvents {
public:
virtual void OnGamePadChanged(const GamePadEventData *evt);
virtual void OnHatSwitch(uint8_t hat);
virtual void OnButtonUp(uint8_t but_id);
virtual void OnButtonDn(uint8_t but_id);
};
#define RPT_GEMEPAD_LEN 5
class JoystickReportParser : public HIDReportParser {
JoystickEvents *joyEvents;
uint8_t oldPad[RPT_GEMEPAD_LEN];
uint8_t oldHat;
uint16_t oldButtons;
public:
JoystickReportParser(JoystickEvents *evt);
virtual void Parse(USBHID *hid, bool is_rpt_id, uint8_t len, uint8_t *buf);
};
#endif // __HIDJOYSTICKRPTPARSER_H__Знайшов на Arduino.cc форумі таку ж саму тему, але відповіді там не знайшов.
https://forum.arduino.cc/t/controlling- … ick/649874
Може хтось може мені допомогти в цьому питанні, або підскажіть де копати))
#6 Re: Різне » Обмін, продаж, то що... » 2022-08-17 12:59:20
Є в наявності 10 плат Arduino Nano Every (Original) обміняю на 10 плат Arduino Nano v3.0 (original or copy)
#7 Re: Проекти » Arduino для музикантів » 2022-08-17 12:54:37
Ось глянь сюди що зібрав ще, трохі цікавих девайсів))
Може буде комусь цікаво
Синт на ардуіно нано
#8 Re: Проекти » Arduino для музикантів » 2021-02-24 16:11:55
Всім привіт зібрав ще таку штуку, що скажете, можна грати свої ритми
Драм машина на микроконтроллері Atmega328
DIY Drum Machine (The Bleep Drum) ? своими руками
#9 Re: Проекти » Arduino для музикантів » 2020-11-29 12:49:23
Всім привіт!
Новій девайс зібрав на DIY Метроном
Як вам? Що скажете?
Нічого складного
#10 Re: Проекти » Arduino для музикантів » 2020-06-05 18:28:03
Зібрав таку річ Сенсорний синтезатор
Як вам? Що скажете?
Можна грати самому, можна підключити до модульного синтезатора.
#11 Re: Проекти » Arduino для музикантів » 2020-01-20 15:27:08
Зробив ось такий фразовий семплер
Фразовый сэмплер ? ( модуль записи на микросхеме 1820)
Як вам?
Запис до 10 сек.
Запис фрази або муз треку та в живу змінювати його
#12 Re: Проекти » Arduino для музикантів » 2019-12-09 15:56:13
Привіт всім зібра таку штуку)) на модулі mpr121
Arduino fruit Piano ? (на основі mpr121) прошив в Midi
Як вам?
можна на фруктах грати свою музику))
#13 Re: Проекти » Arduino для музикантів » 2019-09-10 12:10:16
#14 Re: Проекти » Arduino для музикантів » 2019-07-03 14:57:56
#15 Re: Проекти » Arduino для музикантів » 2019-05-17 23:34:29
ось що вийшло, зробив собі міді контролер
#16 Re: Різне » Обмін, продаж, то що... » 2017-11-26 10:20:55
Так может сразу и цену пиши.
модуль Wifi ESP8266 ESP-12E з монтажною платою - 80 грн
#17 Re: Проекти » Arduino для музикантів » 2017-11-26 10:12:14
по юсби у вас всё работает как вам нужно ?
так по юсб працює все гууд, але хочетеся щоб було без юсб на відстані, через скетч firmata arduino радіомодуль не працює NRF24L01, я ще не розібрався. Як зробити по без юсб?
#18 Re: Проекти » Arduino для музикантів » 2017-11-24 15:20:15
Знайшли простіше рішеня
? Ага, попробуйте, наскільки воно простіше
. А головне дуже здивуєтесь радіусом дії
Ну якщо ви в цьому розбираєтесь то допоможіть як зробити бездротово, бо тільки вийшло скласти пульт по кабелю юсб
#19 Re: Проекти » Arduino для музикантів » 2017-11-18 12:06:03
от вашего басиста лего-коробочка развалится, а уж если врубит барабанщик...))))
)))) ми спокійно будемо грати, тільки двое в групі поки що...
#20 Різне » Обмін, продаж, то що... » 2017-11-18 11:57:23
- Андр.
- відповідей: 29
Пропоную в цій темі писати кому що потрібно, продати або обміняти між користувачами цього форума.
Продам модуль Wifi ESP8266 ESP-12E з монтажною платою.
або обміняю на два радіо модулі NRF24L01. вислати можу новою поштою
#21 Re: Проекти » Arduino для музикантів » 2017-11-18 11:44:15
вирішив не брати модуль esp8266 дуже складний в програмуванні та підключенні, вирішив взяти два радіо модулі NRF24L01, почав збирати пульт.
#22 Проекти » Arduino для музикантів » 2017-11-12 20:03:25
- Андр.
- відповідей: 23
Хочу зроби проект з Arduino та цієї програми VVVV https://vvvv.org
Проект для виступу рок гурту. Під час виступу через проектор візуалізувати різні ефекти, зміни кольору, фігур, відео, та інше.
Ось недавно зробив у програмі vvvv такий патч на малюнку.
Можливо зробити так щоб через модуль esp8266 по wifi я міг управляти програмою? Зробити типу пульт керування і зі сцени управляти ним)))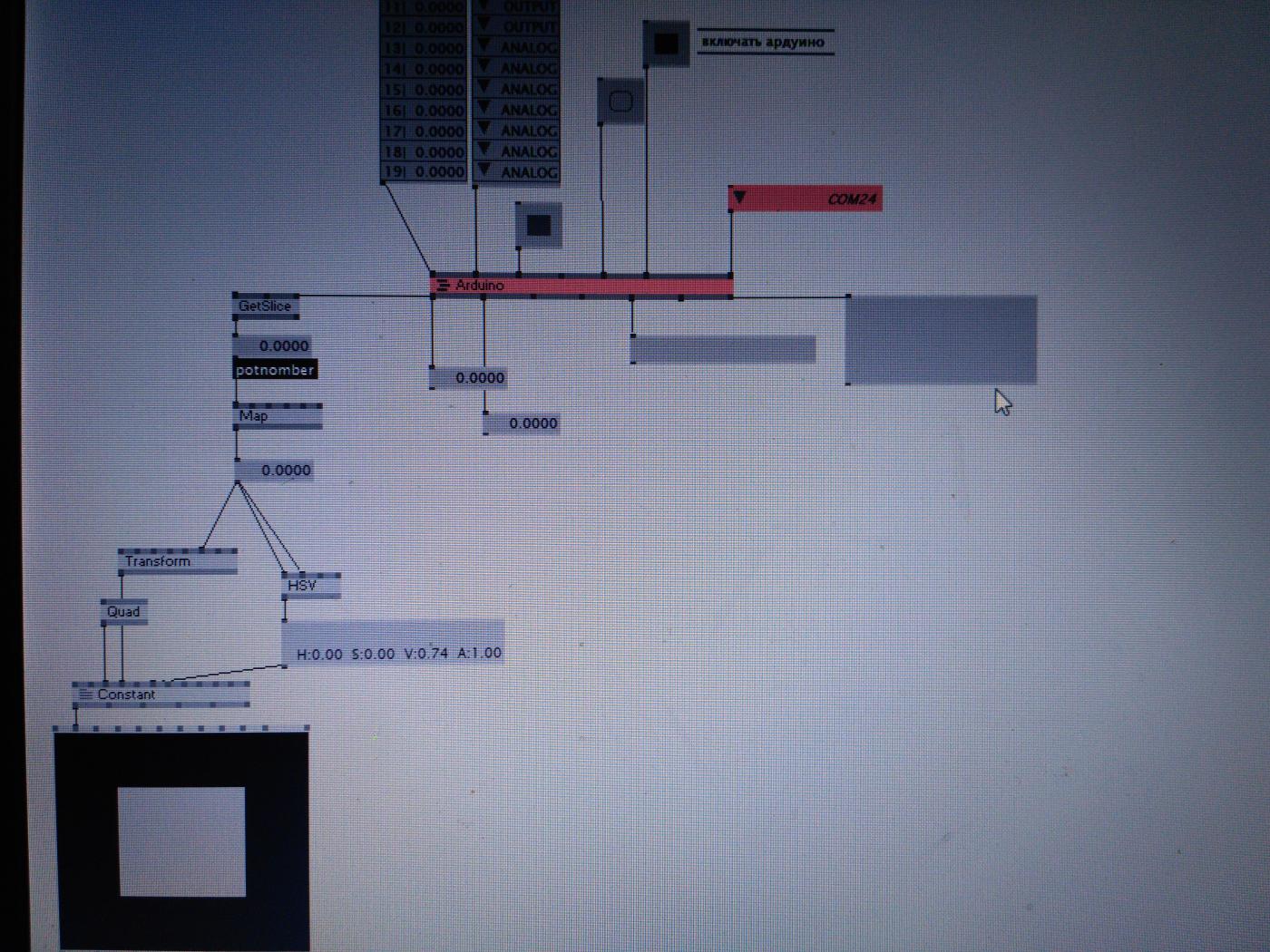
Сторінки 1