Ви не увійшли.
- Теми: Активні | Без відповіді
#2 Re: Проекти » Перенос проекта з atmega8a в stm8s » 2026-06-01 22:32:19
а навіщо міняти залізо якщо працює? тоді краще на CH32V003J4M6 20 центів
#3 Re: Різне » Задатчик 4-20ma » 2026-05-16 17:39:05
взяв arduino-oled-3key-mcp4725-mcp6002-AO3400
пробую
#4 Re: Різне » Задатчик 4-20ma » 2026-05-16 08:10:36
2 канала - 24 вольта петля(пасив) і 4_20ма до 200мв прямий(актив)
oled -3 key-щоб бачити що виходить
#5 Різне » Задатчик 4-20ma » 2026-05-15 19:29:31
- nickjust
- відповідей: 6
Вітаю!
Потрібен Задатчик тока 4-20ma на ардуіно
Хтось таке робив?
Схему і скетч можна?
#6 Re: Проекти » Термостанція для ребола BGA » 2026-05-09 11:09:41
знайшов онлайн кальк ,швидко підібрав!
все працює
#7 Проекти » Термостанція для ребола BGA » 2026-05-07 18:12:58
- nickjust
- відповідей: 2
Вітаю
Колега попросив зробити термостанцію на Arduino nano,2 max6675,2 ssr-40da
Проект Леоніда
В наявності є Плита(низ) 1500 вт
Прошив,спаяв...і така проблема : Не тримає температуру , пригає на 5-10 градусів.
Я так поняв проблема в PID коефіціентах.Вже 6 годин махаюсь і поки ніяк
Може хто таке робив?
#8 Re: Проекти » скетч, що керує електродвигуном із зворотним зв’язком » 2026-04-29 10:29:12
https://forum.gsmhosting.com/vbb/index.php
#9 Re: Проекти » скетч, що керує електродвигуном із зворотним зв’язком » 2026-04-29 07:24:59
Я рахую,тре всьо спробувати...та вчитися!
І краще розмовляти з ШІ ніж з їбаньками з форумів,таких як Радіокот (правда там є і нормальні)
Мені ще подобається Чорний форум - також норм допомогають.
І ще замічаю ,що інет став нууу дуже грошовий ....усі кинулися заробляти...за прошивку 2017 року ,яка нещо давно вільно була на оффсайті Acer хотят гроші....гроші....гроші....
#10 Re: Проекти » скетч, що керує електродвигуном із зворотним зв’язком » 2026-04-28 20:16:31
А так?
const byte pinA = 2;
volatile uint16_t pulses = 0;
void isrA() {
pulses++; // ISR короткий — это хорошо
}
void setup() {
Serial.begin(9600);
pinMode(pinA, INPUT); // или INPUT_PULLUP при необходимости
attachInterrupt(digitalPinToInterrupt(pinA), isrA, RISING);
}
void loop() {
static uint16_t last = 0;
uint16_t snapshot;
noInterrupts(); // критическая секция
snapshot = pulses; // атомарный снимок
interrupts();
if (snapshot != last) {
Serial.print("Pulses: ");
Serial.println(snapshot);
last = snapshot;
}
}і знову jokeR правий,можна простіше
відкриваємо Arduino IDE
Sketch → Include Library → Manage Libraries
В пошуку пишемо:
Encoder
либа от Paul Stoffregen
нюанс-либа рахує x4-10 P/R → 40 імпульсів/оберт
#11 Re: Проекти » скетч, що керує електродвигуном із зворотним зв’язком » 2026-04-28 18:08:44
Починай з каналу А
відкрий Serial Monitor (9600),помалу зроби 1 оберт
повинен побачити
Pulses: 10
якщо 10 - гуд,якщо інше - херовий контакт,живлення енкодера,довгі дроти,підтяжка
включити INPUT_PULLUP , додати кондюк 0.1 мкФ на землю (A → GND)
У Omron E6B2-CWZ6C: вихід транзисторний -«1» формується підтяжкой
фронт може бути «брудний» → берем тілько RISING
const byte pinA = 2; // обязательно пин с прерыванием (UNO: 2 или 3)
volatile unsigned int pulses = 0;
void isrA() {
pulses++; // считаем только фронт
}
void setup() {
Serial.begin(9600);
pinMode(pinA, INPUT); // если есть внешняя подтяжка
// pinMode(pinA, INPUT_PULLUP); // включи это, если сомневаешься
attachInterrupt(digitalPinToInterrupt(pinA), isrA, RISING);
//attachInterrupt(digitalPinToInterrupt(pinA), isrA, CHANGE); // 20 имп на оборот
Serial.println("Start test");
}
void loop() {
static unsigned int last = 0;
if (pulses != last) {
Serial.print("Pulses: ");
Serial.println(pulses);
last = pulses;
}
}#12 Re: Проекти » скетч, що керує електродвигуном із зворотним зв’язком » 2026-04-27 13:10:09
https://forum.arduino.ua/img/members/3885/Omron-E6B2_CWZ6C.zip
#13 Re: Програмування Arduino » скетч » 2026-04-24 11:01:49
jokeR - правий ,як завжди :-)
#14 Re: Програмування Arduino » скетч » 2026-04-23 19:14:20
Adafruit_NeoPixel strip= Adafruit_NeoPixel(59, 2, NEO_GRB + NEO_KHZ800);
59 — загальна к-сть led
2 — пiн Arduino
інше — тип ленти
якщо лента WS2812B 144 LED/м, то тре міняти 59 на 144
Adafruit_NeoPixel strip= Adafruit_NeoPixel(144, 2, NEO_GRB + NEO_KHZ800);
0.5 метра > 72
2 метра > 288
ще у коді лічильник:
if((_gtv30) >= (59)) ...
та:
_gtv30 = _count2_Value;
логіка на 59 led
знайди та міняй:
if(_count2_Value >= 59) на: if(_count2_Value >= 144)
аналогічно:
if((_gtv30) >= (59)) також на 144
якщо це годинник ,то FLProg робить так: наприклад 1 цифра = 7–14 led
ГОЛОВНЕ!
Кількість світлодіодів на сегмент" краще змінювати в FLProg, а не в коді.
У вашому скетчі логіка прив'язки фізичних світлодіодів до логічних сегментів індикатора вже зашита в масиви _FLPArray... і мультиплексори if((_gtv30) == X). Якщо просто збільшити кількість світлодіодів, нові діоди не відображатимуть дані сегментів коректно.Відкрийте проект у FLProg, знайдіть блок Індикатор на WS2812B (або аналогічний), у його властивостях змініть параметр "Кількість світлодіодів на сегмент" або "Загальна кількість світлодіодів" та заново скомпілюйте скетч. Генератор сам правильно розподілить мапінг.
#15 Re: Різне » Proteus 9.0 » 2026-03-16 19:35:26
_ttps://rutracker.org/forum/viewtopic.php?t=6828562
#16 Re: Апаратні питання » Захист від зворотнього струму та зміни полярності. » 2026-03-01 08:18:24
Курди!
Да поставь діод Шоткі та галогенку
і буде тобі переплюсовка та кз захист
#17 Re: Різне » 3D моделювання » 2026-01-03 23:01:52
solidworks або компас
#18 Re: Проекти » Датчик напруги 220В з малим струмом і гальванічною розв"язкою » 2026-01-01 21:11:07
як варіант - кп103 + 2 опора..пару витків на кабель 220 і на Затвор
#19 Re: Проекти » Датчик напруги 220В з малим струмом і гальванічною розв"язкою » 2025-12-29 14:11:44
Тоді ...резистор 1 м + неонка + фоторезак скотчем - і на аналоговий вхід
....поки писав однакові думки
#20 Re: Проекти » Датчик напруги 220В з малим струмом і гальванічною розв"язкою » 2025-12-29 13:12:12
З мого проекта ...робоча схема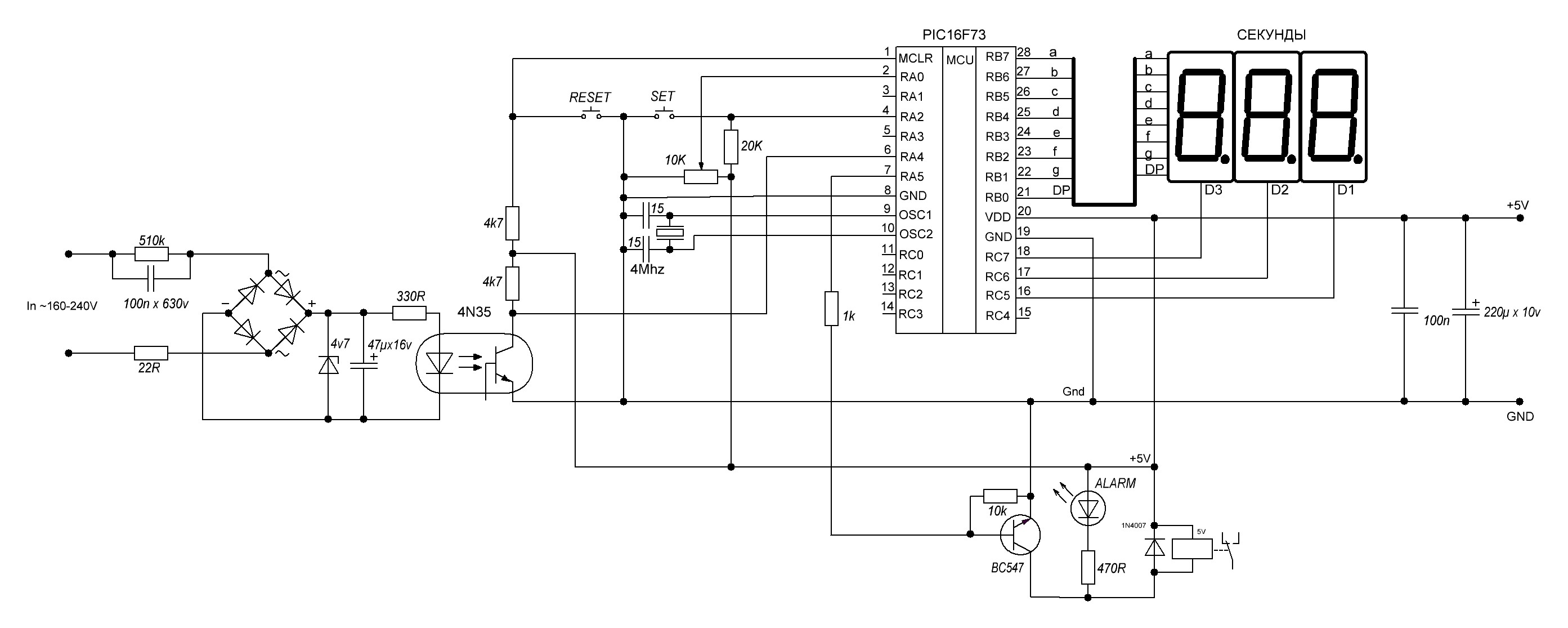
#21 Re: Апаратні питання » LilyPad Arduino » 2025-12-02 19:24:49
https://www.instructables.com/Arduino-Lilypad-Tutorial/
#22 Re: Проекти » Arduino vs LabPower » 2025-11-22 08:41:13
Дякую! Мені цікава ваша думка
ИМХО ..
Зберу силову частину на LM723 - а потім буду пробувати цифру
(В мене блок живлення PS1502 працює вже 20 років на LM723)
#23 Re: Проекти » Arduino vs LabPower » 2025-11-21 19:37:29
Дали схему ,що скажете?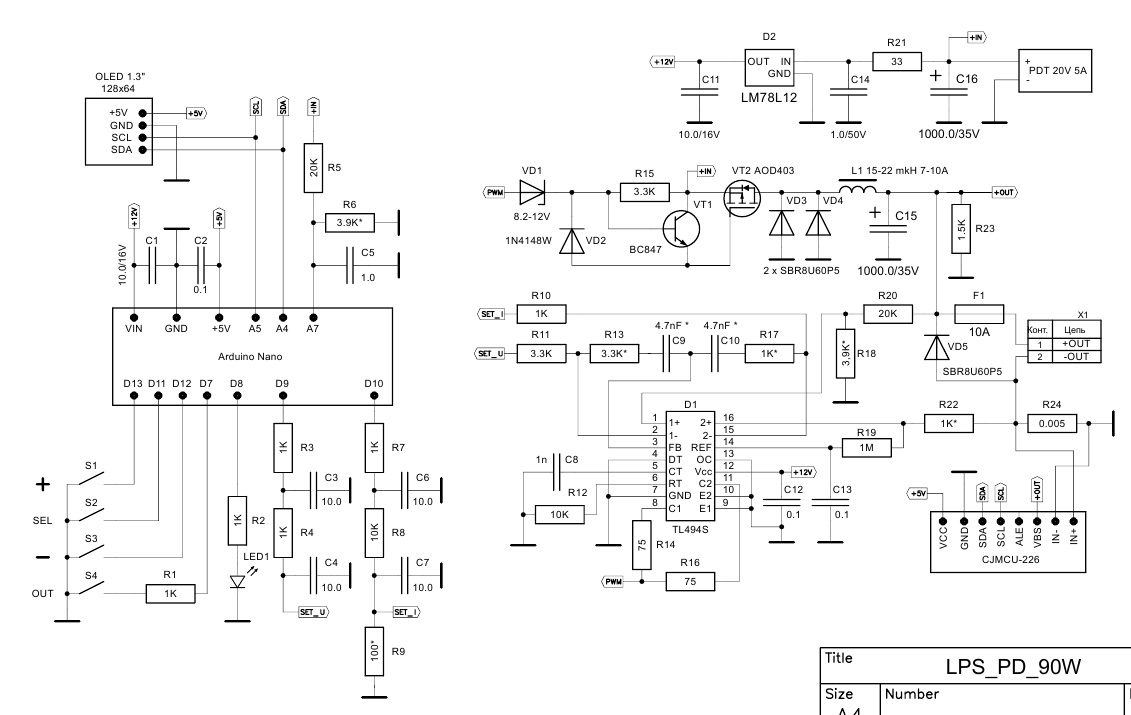
#24 Re: Проекти » Arduino vs LabPower » 2025-11-20 22:37:14
2dimich
Запропонуйте!
На чом би робили і таке інше....
#25 Re: Проекти » Arduino vs AGM Charger » 2025-11-20 13:22:23
Так йому і скажу!
Хоча ....зная цих варьятів ,будуть колхозити....100пудов! ![]()