Ви не увійшли.
- Теми: Активні | Без відповіді
Сторінки 1
#1 Re: Проекти » Откатные ворота на ардуино » 2022-01-28 00:22:52
Поищите другие библиотеки, например https://github.com/pouriap/TinyRF
К сожалению((( Че т не то(
#2 Re: Проекти » Откатные ворота на ардуино » 2022-01-23 22:38:11
У меня все работает уже, кроме того, что не могу реализовать приемник 433МГц на плате аттини т88, не подходят библиотеки RCswitch(((
#3 Re: Проекти » Откатные ворота на ардуино » 2022-01-23 17:28:16
как-то так: если нажата кнопка соответствующая концевику и концевик сработал - то ничего не делаем, иначе - делаем
т.е. через ELSE создать работающее условие, а через IF - отказ?
#4 Re: Проекти » Откатные ворота на ардуино » 2022-01-20 21:53:48
Концевики и управление на моем макете управляются обычными кнопками, а работа привода -реле.
Пошагово буду усложнять конструкцию, надеюсь не в одиночку))
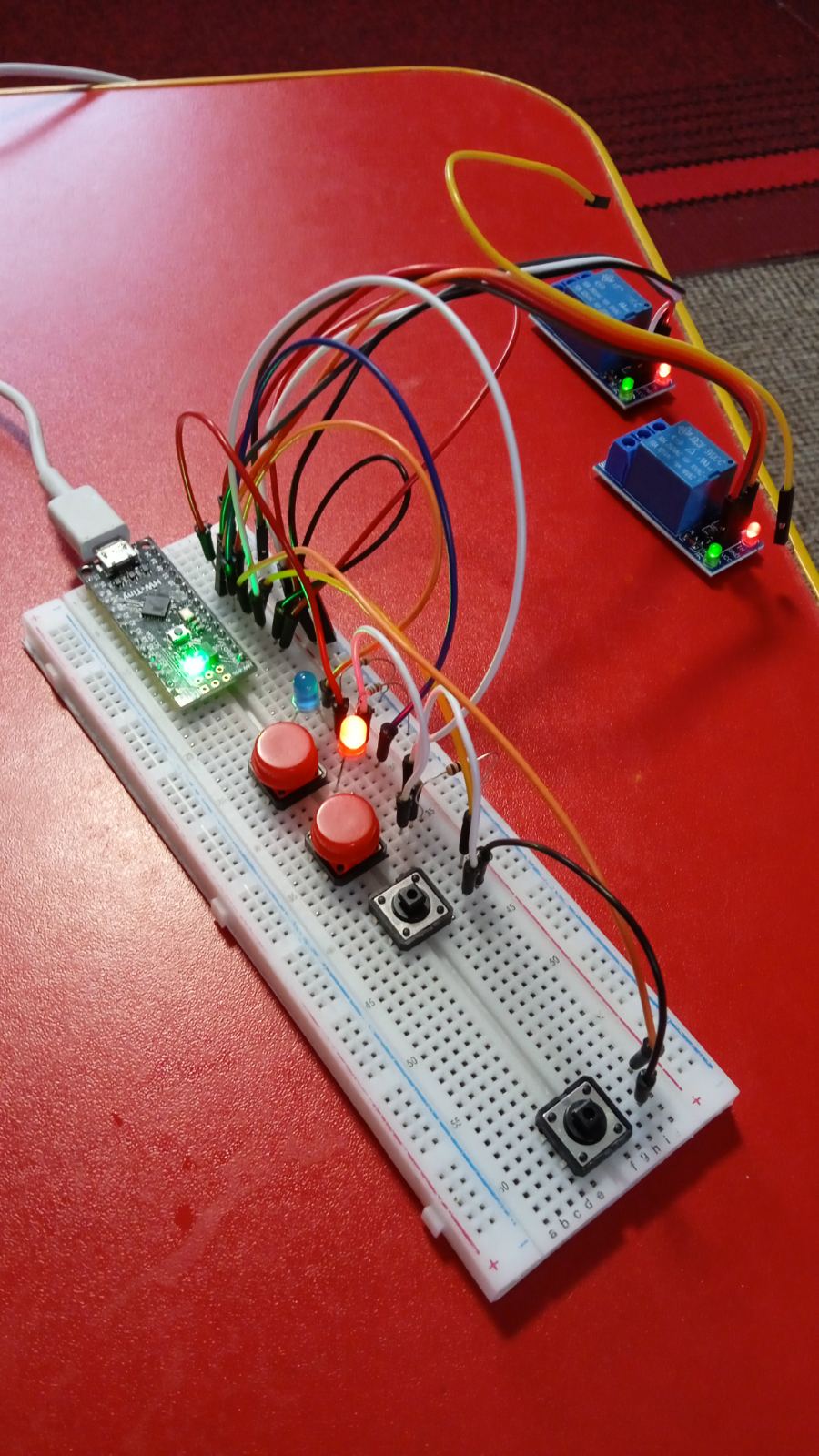
#5 Re: Проекти » Откатные ворота на ардуино » 2022-01-20 21:47:23
концевик, по моему мнению, будет один на открытие и закрытие. Начальный скетч до горя печальный, но если есть в хозяйстве лишние пальцы и масса приводов - можно использовать!)))
По предварительному проэкту оказалось есть возможность одновременно запускать привод в обоих направлениях)))
Еще я не научился избавляться от delay(), по сему не смог осуществить на макате мигание двумя светодиодами в процессе открывания или закрывания ворот. Строго не судите пожалуйста, помогите разобраться.
#include <GyverButton.h>
GButton Knopka (3,HIGH_PULL,NORM_OPEN);
GButton Knopka2 (10,HIGH_PULL,NORM_OPEN);
int releOpen = 8;
int releClose = 9;
int LedB = 7;
int LedR = 6;
GButton Open (5,HIGH_PULL,NORM_OPEN);
GButton Close (4,HIGH_PULL,NORM_OPEN);
void setup() {
Serial.begin(9600);
Knopka.setDebounce(100);
Knopka2.setDebounce(100);
pinMode(releOpen, OUTPUT);
pinMode(releClose, OUTPUT);
pinMode (LedB, OUTPUT);
pinMode (LedR, OUTPUT);
Open. setDebounce (100);
Close. setDebounce (100);
}
void loop() {
Knopka.tick();
Knopka2.tick();
Open.tick();
Close.tick();
//____________открытие ворот__________
if (Knopka.isPress()){
digitalWrite (releOpen, HIGH && Serial.println ("Ворота открываются") );
if (releOpen || releClose, HIGH)
{ digitalWrite (LedB,HIGH);
digitalWrite (LedR,LOW);
}
}
if (Open.isPress()) {
digitalWrite (releOpen, LOW);
digitalWrite (LedB,LOW);
digitalWrite (LedR,HIGH);
Serial.println ("Ворота открыты");
}
//_____________________закрытие ворот_____________
if (Knopka2.isPress()){
digitalWrite (releClose, HIGH && Serial.println ("Ворота закрываются"));
if (releClose, HIGH)
{ digitalWrite (LedB,HIGH);
digitalWrite (LedR,LOW);
}
}
if (Close.isPress()) {
digitalWrite (releClose, LOW);
digitalWrite (LedB,LOW);
digitalWrite (LedR,HIGH);
Serial.println ("Ворота закрыты");
}
}#6 Re: Проекти » Откатные ворота на ардуино » 2022-01-20 21:39:30
#7 Проекти » Откатные ворота на ардуино » 2022-01-20 21:33:47
- Rulya82
- відповідей: 20
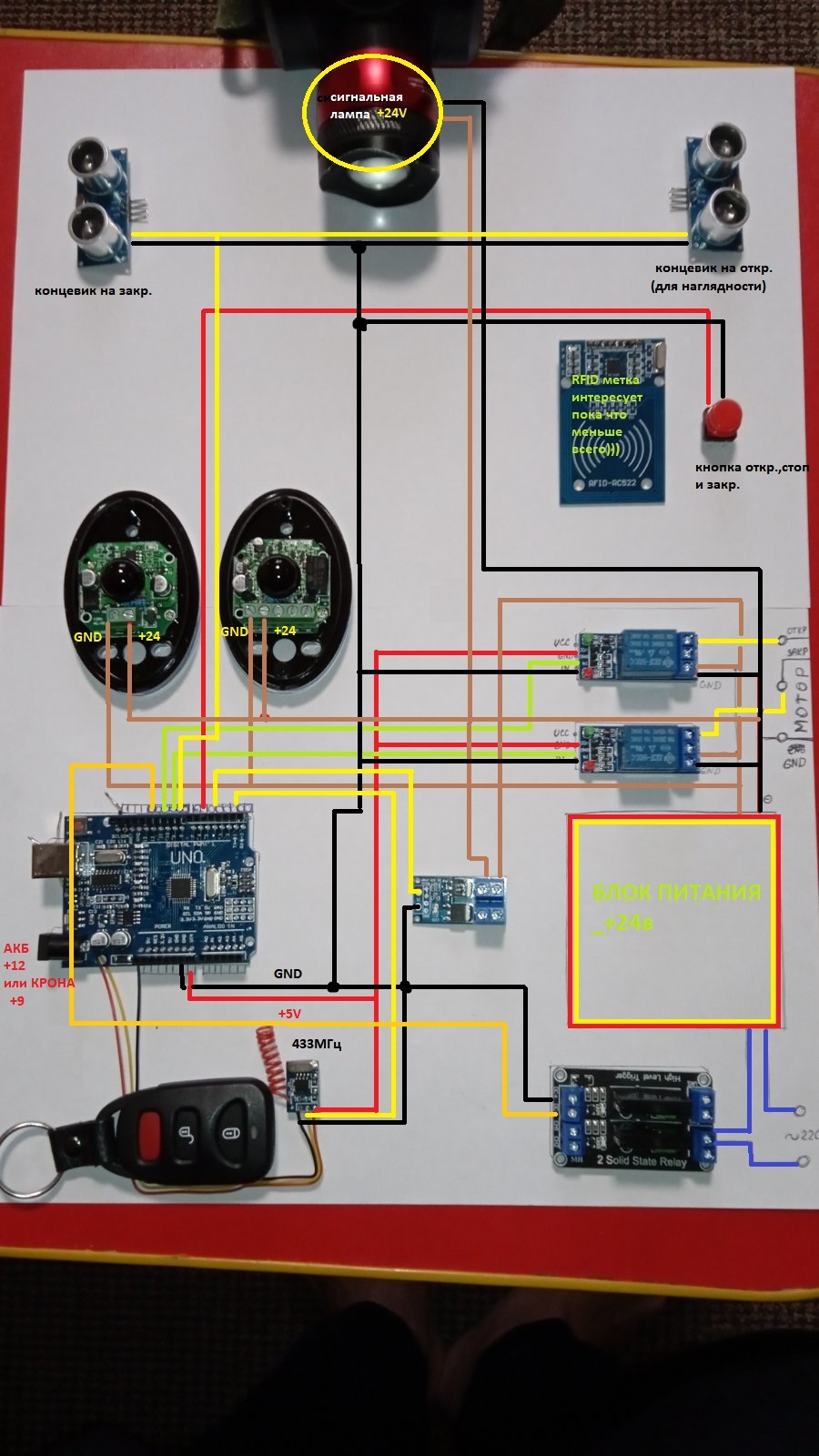
Есть желание и начальная стадия проэкта управления откатными воротами с функцией открытия через приемник 433МГц (или WIFIприемник) и просто с кнопки. Принципиальное желание осужествить это на платформе АРДУИНО УНО или на плате ATtini t88.
По сути не такой уже и терминатор, но учитывая что платформа ардуино для меня лично начала свое существование месяц где то назад - дается не легко.
#8 Re: Програмування Arduino » Потрібна допомога з Ардуіно » 2022-01-20 20:53:47
Используй шаговые двигатели, типа 28BYJ-48, для точного отслеживания пройденного расстояния - зная длинну окружности колеса и к-во шагов двигателя на полный оборот, можно рассчитать пройденное расстояние.
Можно использовать просто двигатель с редуктором, посчитав скорость передвижения всей конструкции и запуская двигатель только на определенное время (t = S/V, где t - время работы двигателя, S - расстояние, V - скорость), но без обратной связи есть риск заехать не туда. 3м вариантом будет установка датчика на колесо для получения обратной связи, например магнит на колесе и датчик Холла или геркон на корпусе - каждый проход магнита мимо датчика фиксируется контроллером и, зная длинну окружности колеса, рассчитывается пройденное расстояние
все равно будут погрешности при движении и вращении колес в поворотах. Использовать эхо-датчики не думали? (аналог робота-пылесоса)
Сторінки 1