Ви не увійшли.
- Теми: Активні | Без відповіді
Сторінки 1
#1 2014-10-14 00:43:22
- TheCluster
- Учасник

- Зареєстрований: 2014-10-13
- Повідомлень: 18
Распечатанный на 3D-принтере FPV-квадрокоптер
Несколько месяцев назад, блуждая по просторам интернета, наткнулся я на проект квадрокоптера, рама которого почти полностью печатается на 3D-принтере. Из не печатных деталей там только крепеж (винты, гайки, нейлоновые стойки и силиконовые демпферы).
Коптер представляет собой вариацию на тему DJI F450 с авторскими дополнениями для FPV. Немного увеличены размеры, добавлен еще один этаж рамы (под передатчик, GPS и полетную камеру).
Прикинув расходы на пластик (3D-принтер у меня есть) и расходы на покупку + доставку + ожидание оригинальной рамы / китайского клона, я решил попробовать напечатать. Прочность рамы конечно меньше оригинала, но с другой стороны напечатать запчасти можно за копейки в течении 2-3 дней. Удобно.
Скачав архив с 3d-моделями деталей, я начал ковырять свой принтер и пробовать печатать.
Все детали рамы должны печататься из ABS пластика, что для моего принтера несколько усложняло задачу. Процесс 3D-печати по FDM-технологии очень чувствителен к множеству внешних факторов, в частности для ABS-пластика нужно поддерживать внутри принтера стабильную равномерную температуру 60-70 градусов, не допуская потоков воздуха. У меня же недорогой китайский клон Ultimaker-1 (с некоторыми элементами конструкции Ultimaker-2), в котором внтуреннее пространство принтера открыто и пластик охлаждается воздухом. Это хорошо подходит для PLA, но создает проблемы с печатью ABS.
Пришлось потратить два вечера на настройку параметров печати и несколько попыток напечатать какую-нибудь деталь.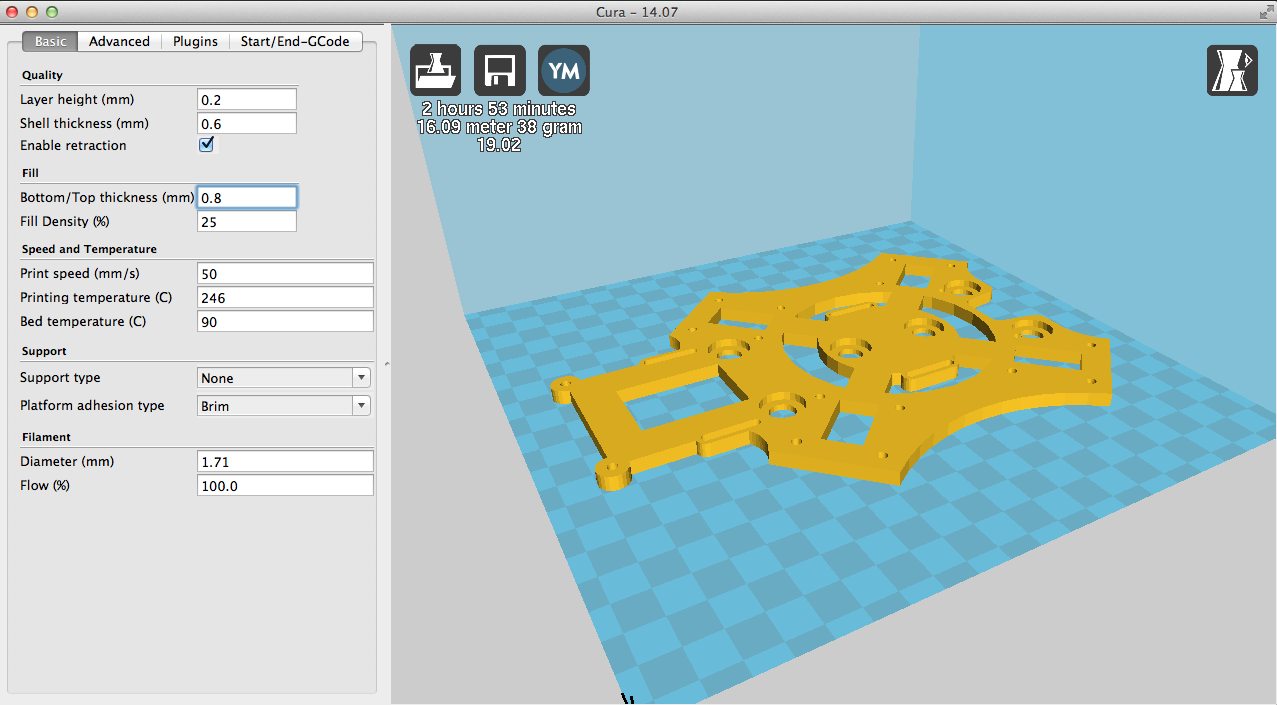
Наконец были подобраны параметры и можно было смело начинать печатать лучи и раму.
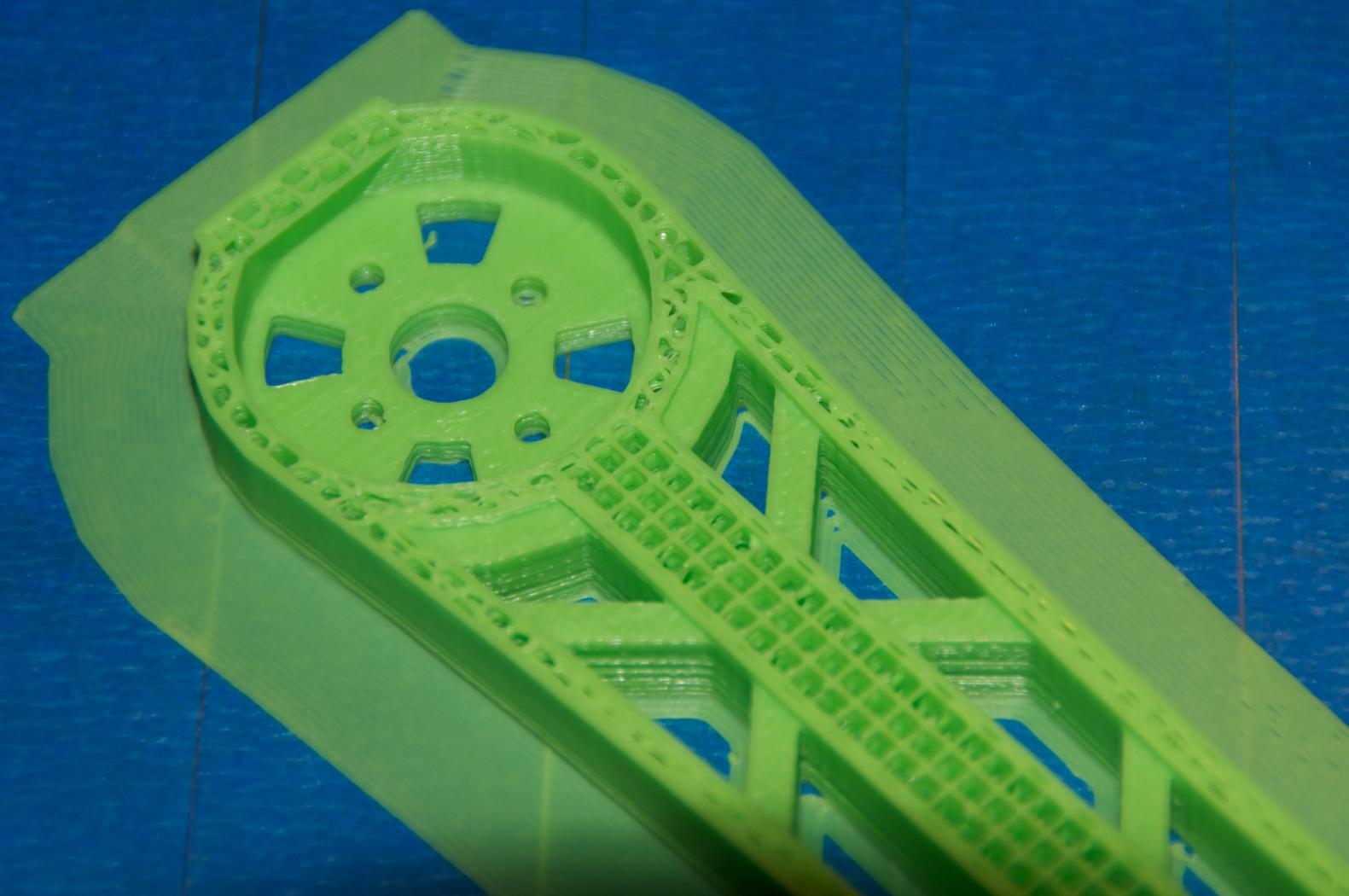
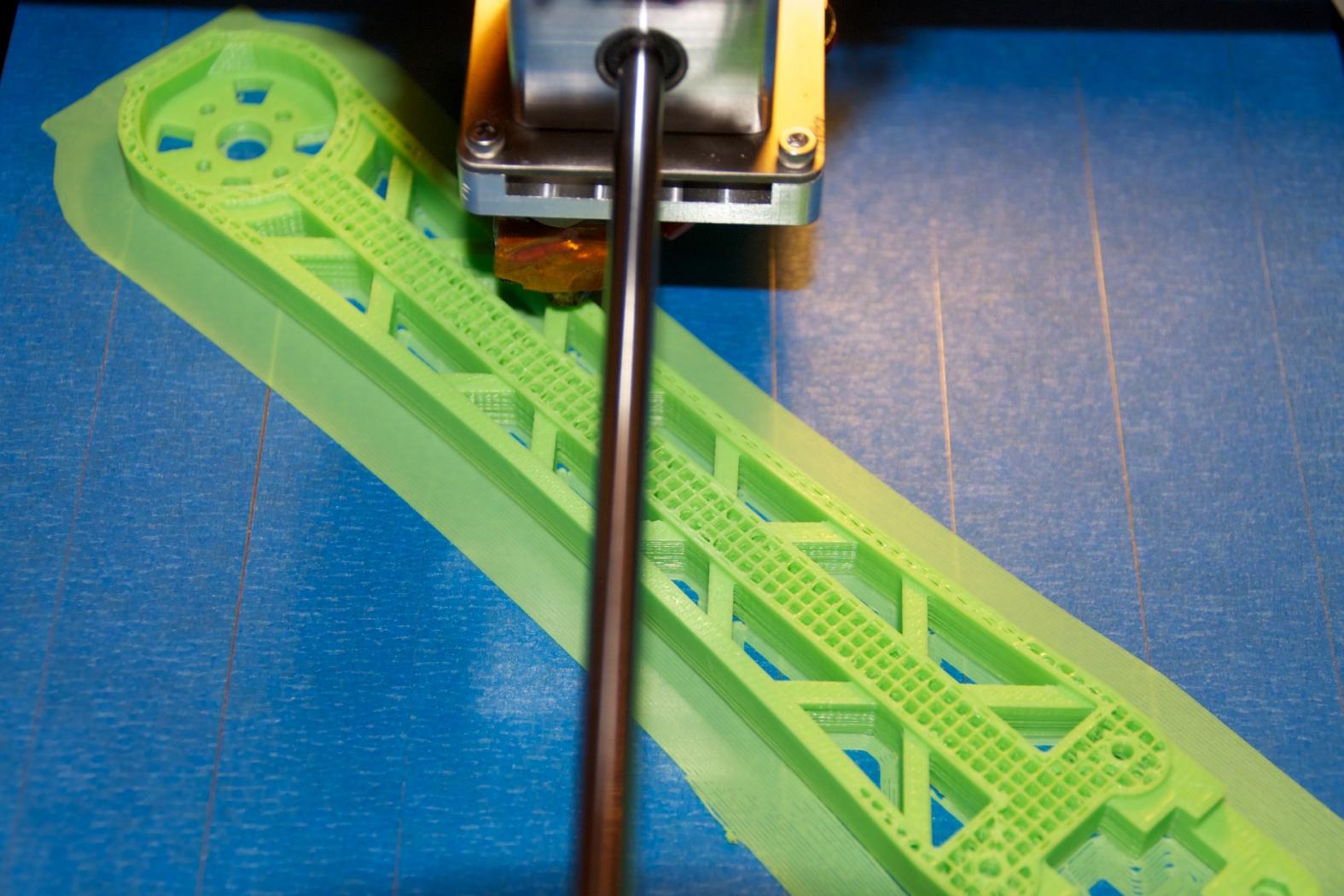
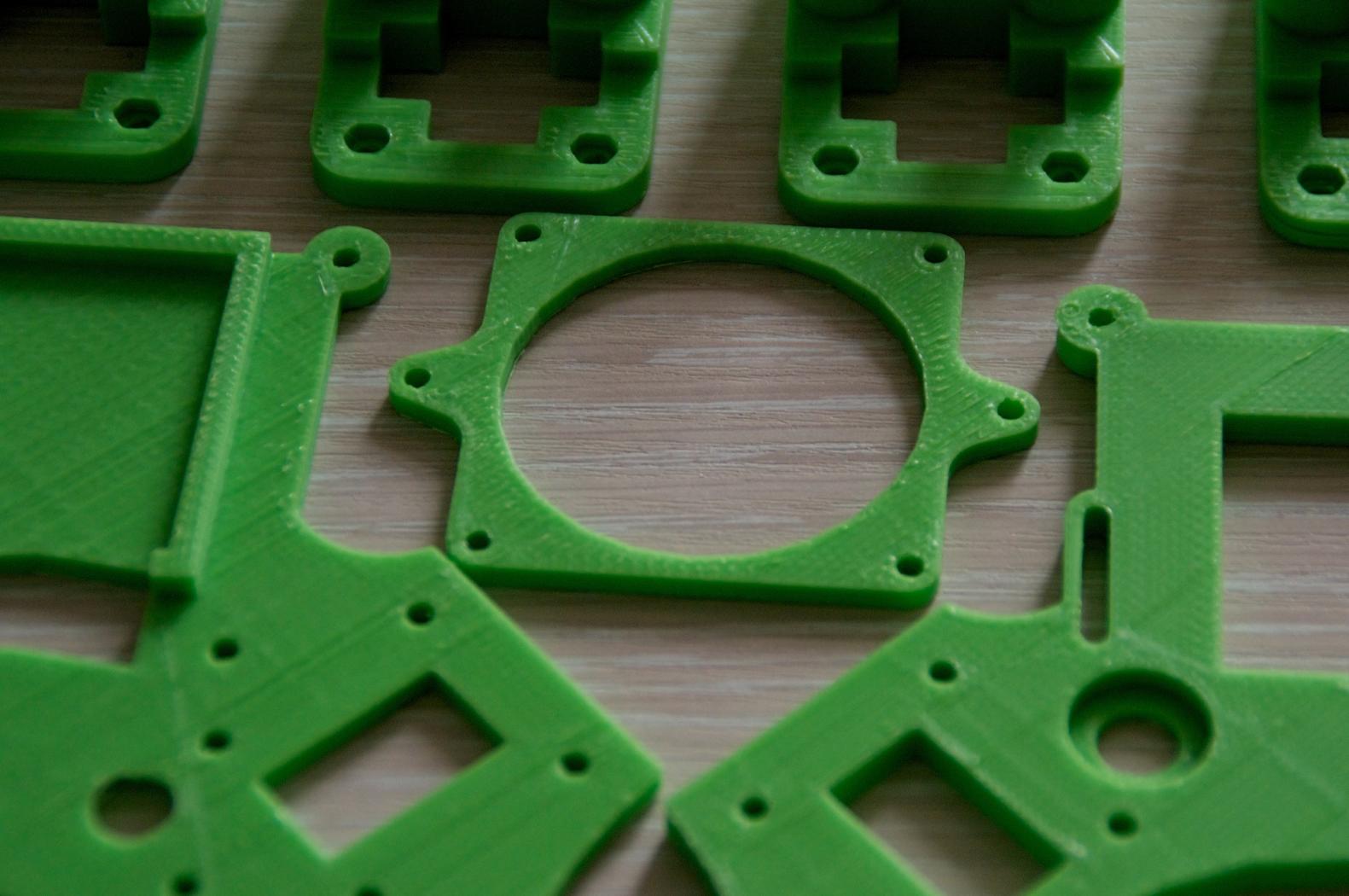
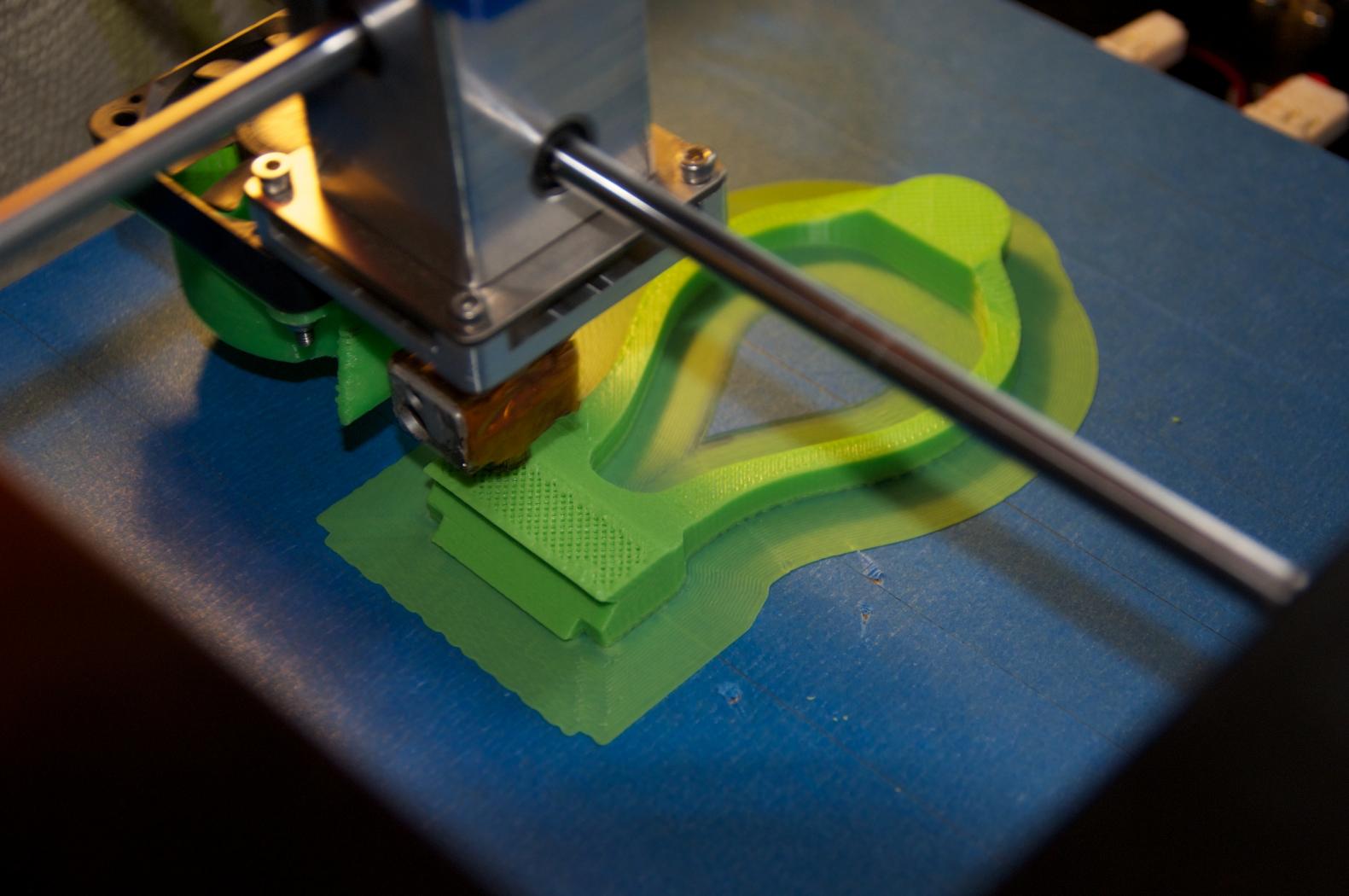
Печать луча: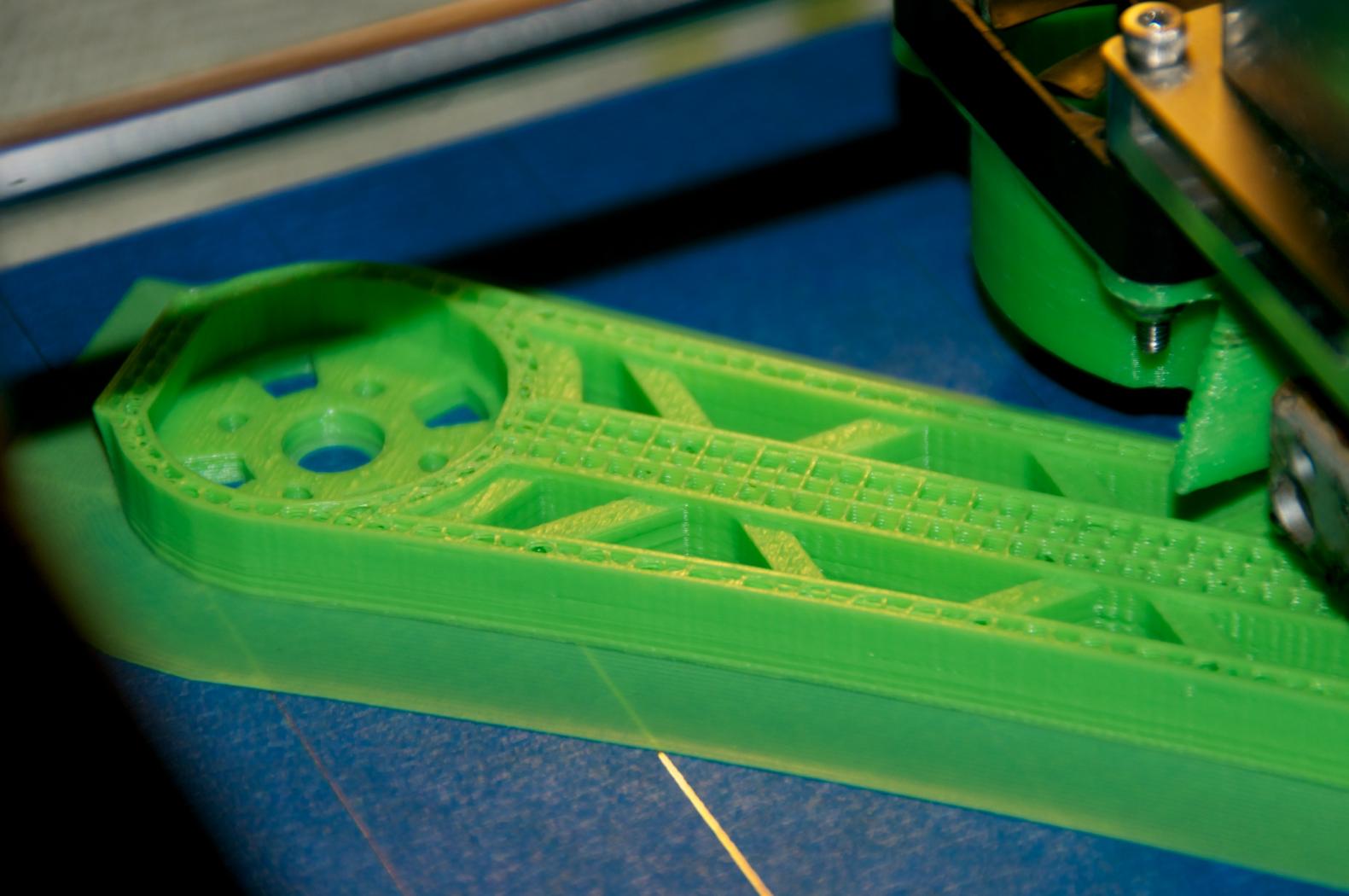
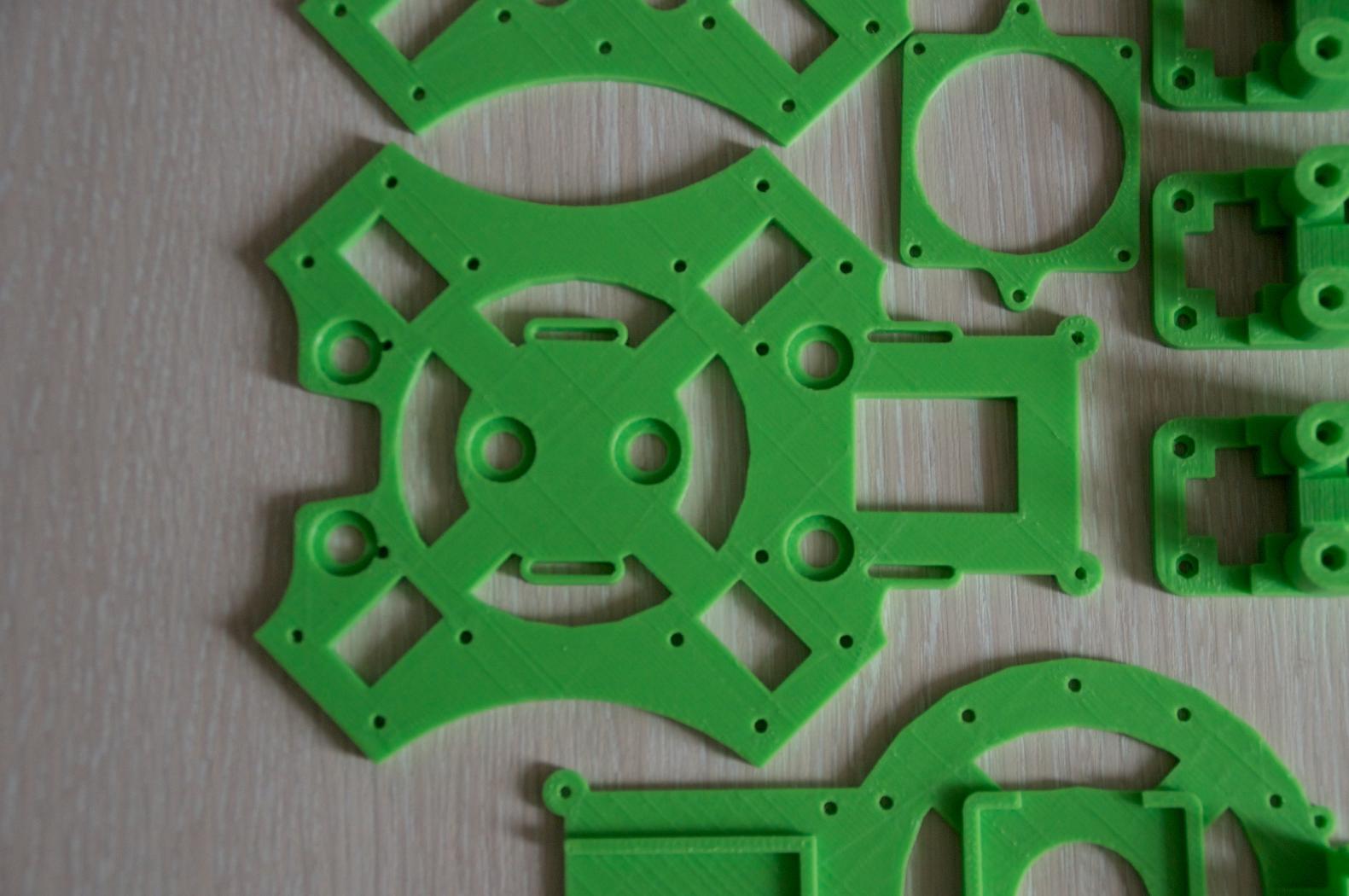
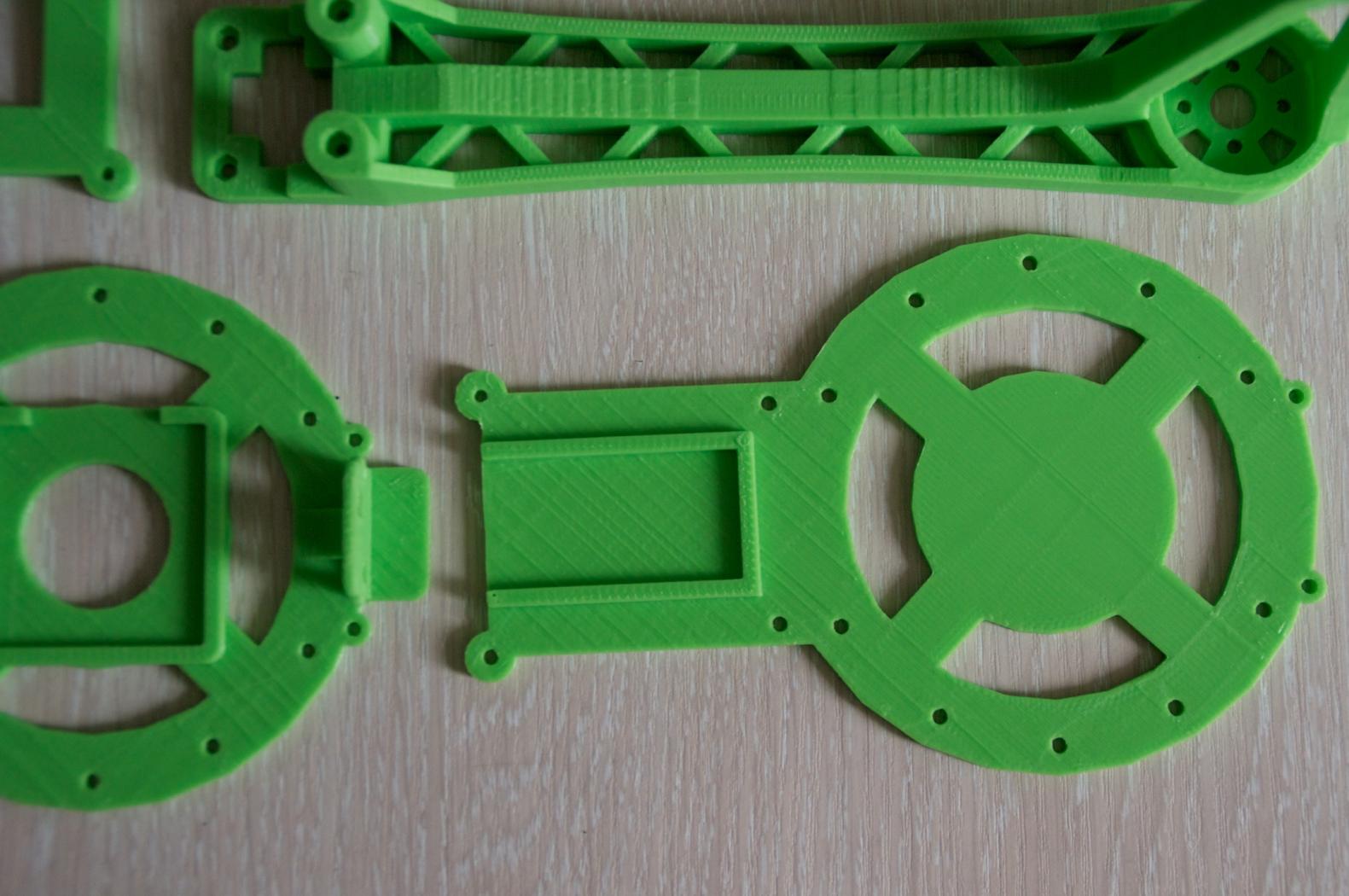
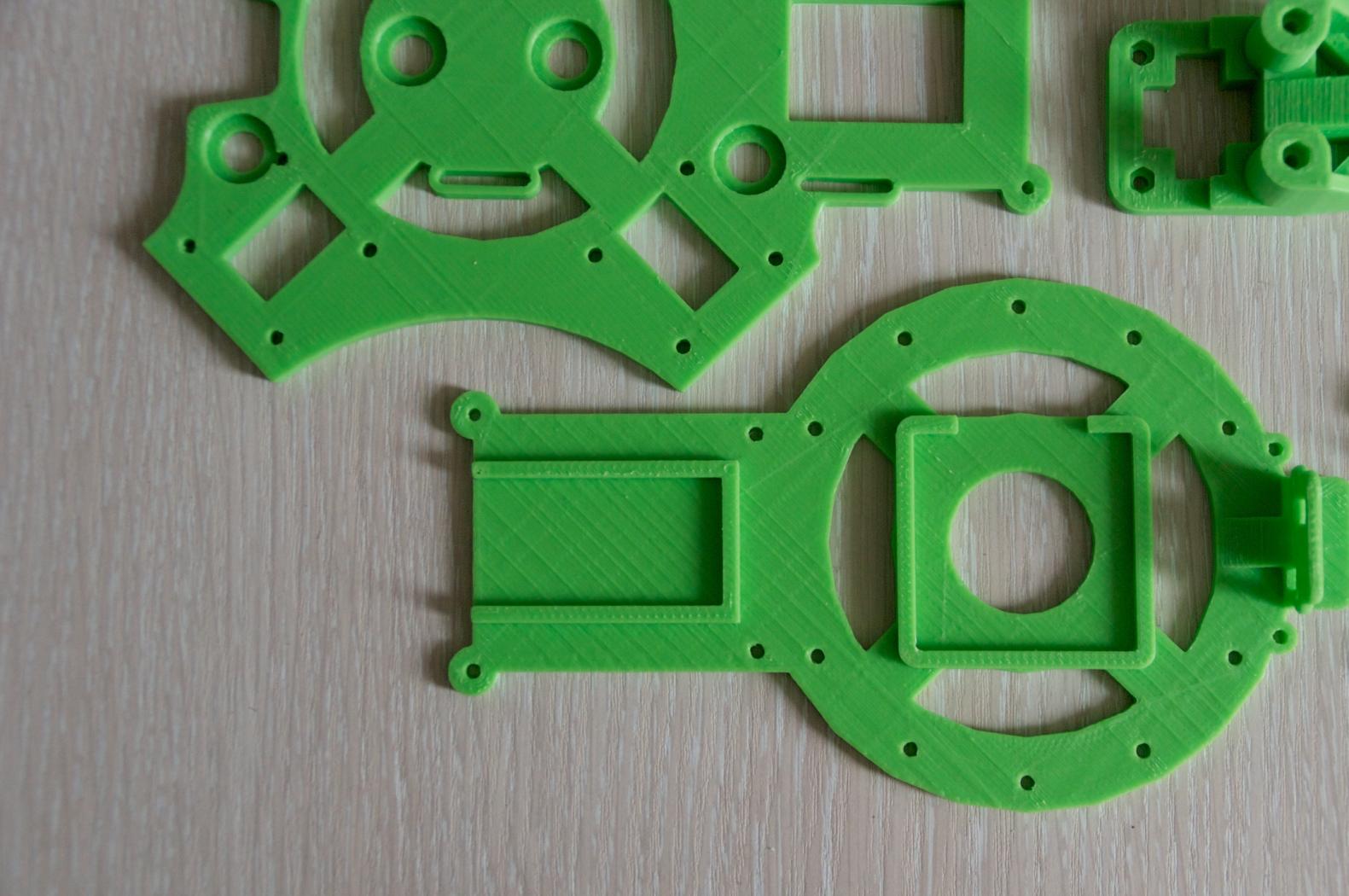
Готовые детали: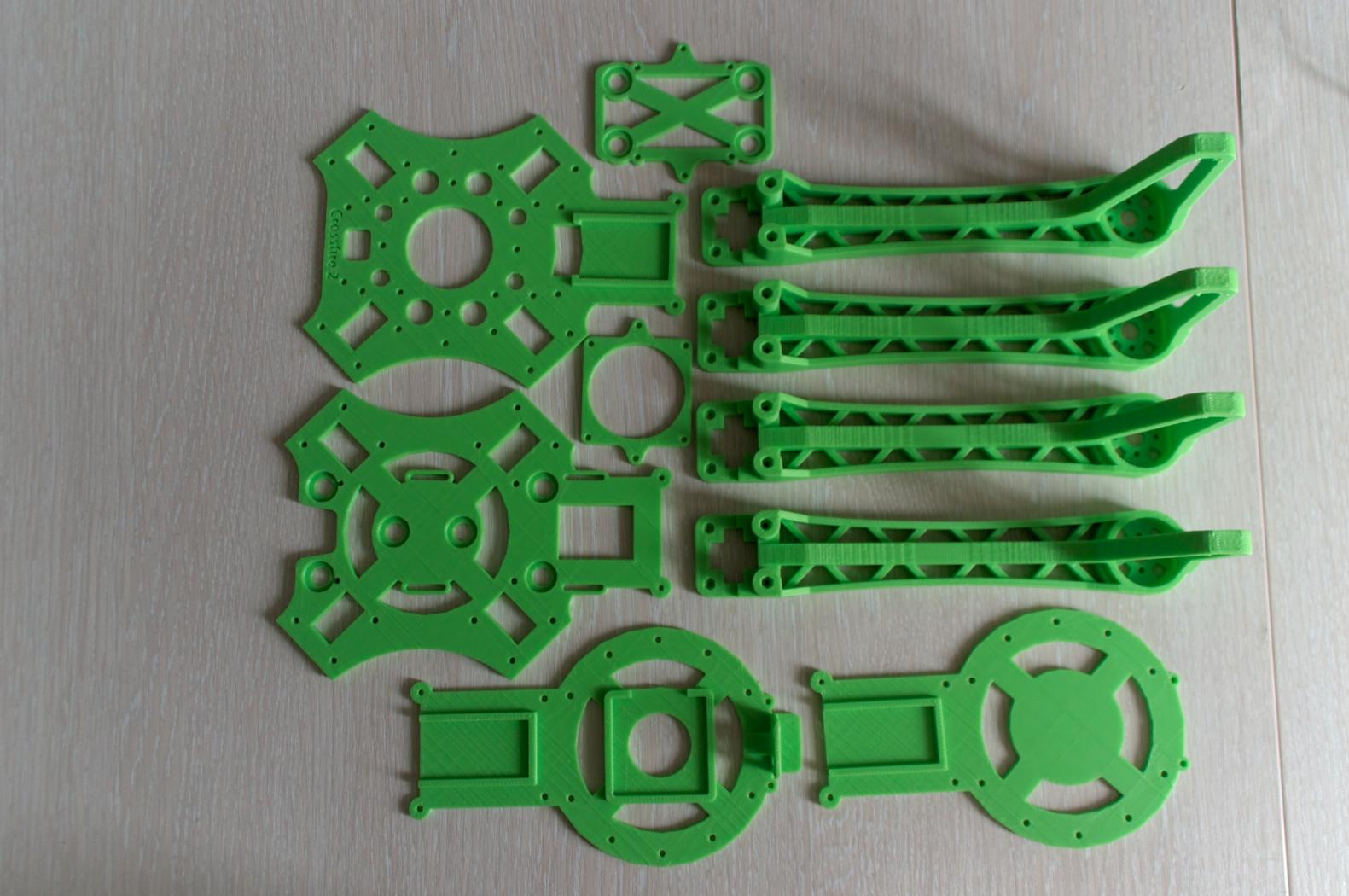

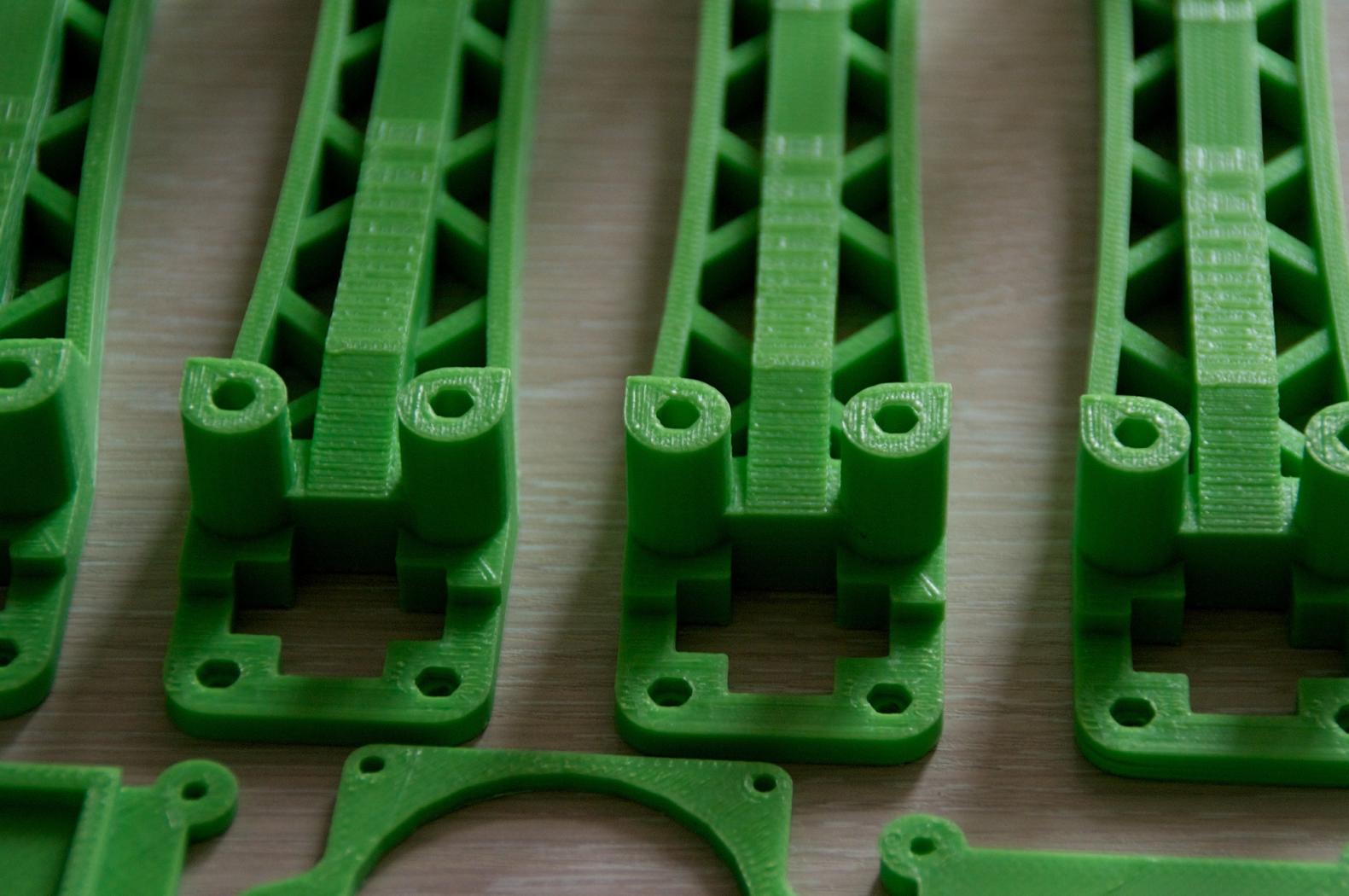

После взвешивания деталей оказалось, что реальный вес одной детали совпадает с расчетным с точностью до 0.1 - 0.5 г.
Общий вес рамы без крепежа : 253.5г (расчетный 252г).
Автор проекта для соединения деталей рамы использует болты M3 и металлические самостопорящиеся гайки с нейлоновыми кольцами. Верхний этаж должен крепиться на нейлоновые стойки. Я решил немного облегчить конструкцию и применил только нейлоновые гайки/стойки, 8 болтов M3x18 (врезаются прямо в пластик) и цианокрилат. Цианокрилат отлично клеит abs-пластик, так прочно, что проще сломать пластик, чем место склейки.
Из оригинальной рамы я не печатал крепление батареи (батарея у меня будет крепиться иначе) и подвес для GoPro (я решил использовать Mobius action cam).
Неактивний
#2 2014-10-14 01:01:37
- TheCluster
- Учасник
- Зареєстрований: 2014-10-13
- Повідомлень: 18
Re: Распечатанный на 3D-принтере FPV-квадрокоптер
Из-за отсутствия времени коптер был собран только через неделю после печати. В процессе сборки выяснилось, что неплохо бы допечатать еще парочку полезных деталей.
Крепление для сонара (HRLV-EZ4) - http://www.thingiverse.com/thing:335343
Посадочные "ноги" - http://www.thingiverse.com/thing:161026
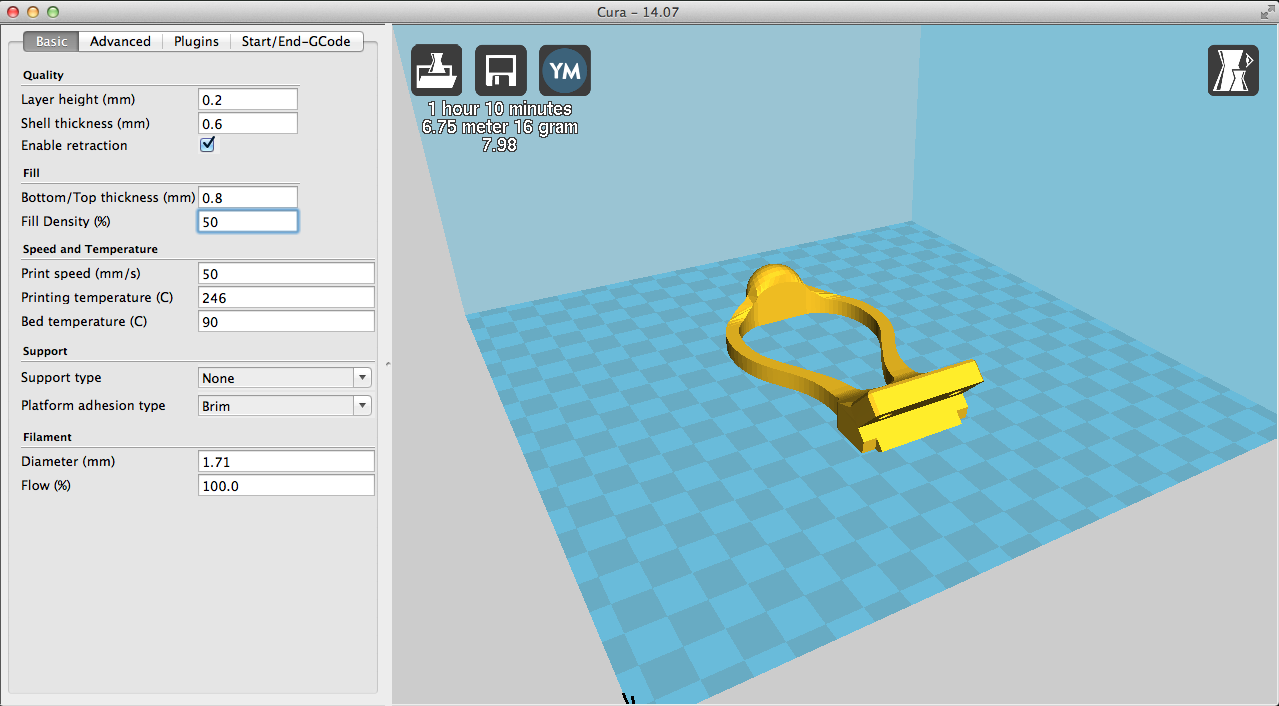

Облегченная версия: 
Так же выявлены недостатки конструкции:
1) Недостаточно жесткие лучи. Они конечно не совсем резиновые, но все-таки было-бы хорошо изменить профиль для лучшей жесткости. Делать больший процент заливки детали пластиком считаю нецелесообразным, это только утяжелит луч. Вероятно, нужен круглый профиль. Однако печать круглого профиля, которй должен держать нагрузку, имеет свои тонкости.
2) Видеопередатчик беззащитен. Вообще. В процессе настройки пидов, коптер перевернулся, упал на крышу и отломалась антенна вместе с разъёмом. Передатчик, порабатав без нагрузки 5-10 секунд, сгорел. Пайка разьема у boscam ts353 отвратительная. В будущем нужно измерить размеры передатчика и спроектировать специальный крепеж, который держал бы SMA-разьем, иначе при следующем падении все повторится.
Что получилось в итоге:


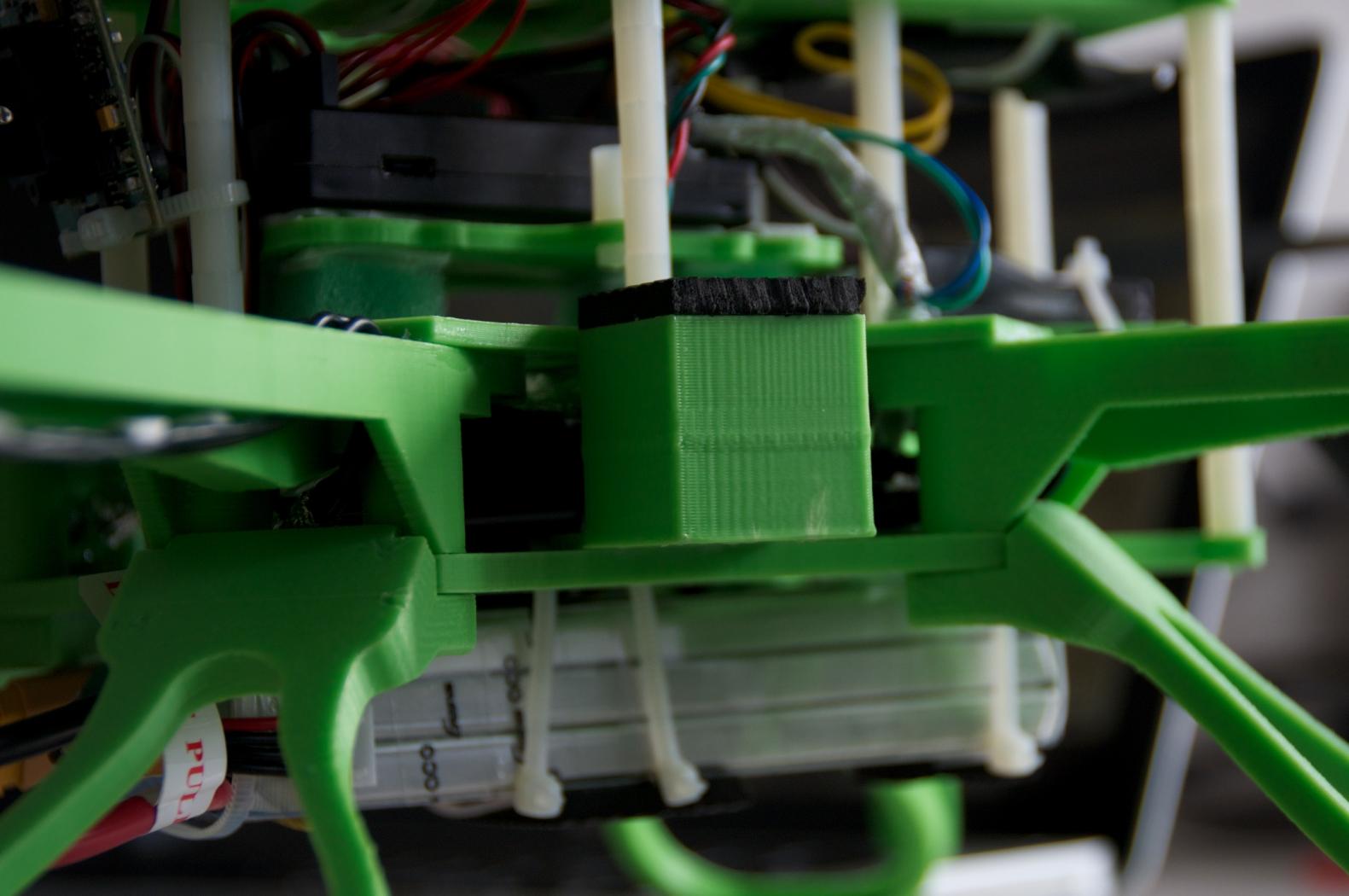

Общий вес (с батареей 3S 4000mAh) - 1292 г, расчетный вес - 1286г.
Неактивний
#3 2014-10-14 01:34:28
- TheCluster
- Учасник
- Зареєстрований: 2014-10-13
- Повідомлень: 18
Re: Распечатанный на 3D-принтере FPV-квадрокоптер
Немного о проблемах.
Что бы коптер взлетел, пришлось немало поплясать с бубном. И зачем я решил попробовать ArduCopter? На назе уже бы давно летал))
Первая проблема подкралась с совершенно неожиданной стороны. Не хотел калиброваться акселерометр. Вообще не хотел, никак. Не без труда нашел описание подобной проблемы у некоторых других юзеров и коменты в стиле "попросите продавца заменить APM, у вас бракованный IMU". Бракованный IMU, значит. Фигово. Пришлось читать даташит, смотреть выводимые в терминале данные при калибровке. Курить код прошивки. Судя по даташиту, IMU действительно бракованный, по крайней мере пороговые значения превышаются. Дальнейшее изучение кода прошивки привело к второму открытию - по какой-то причине в момент инициализации, акселерометр игнорирует параметры, которые ему передаются. MPU6000 является программируемым IMU, и ему можно задать несколько диапазонов измерения ускорения ±2g, ±4g, ±8g, and ±16g. На моей плате возвращаемое значение по одной из осей было чуть больше 16, что говорит о неисправности чипа. А когда я заметил, что в коде используется другой диапазон (меньше 16, по моему 8g), то брак становится совсем очевиден.
Стало понятно, почему прошивка не хочет завершать калибровку. Однако после получаса экспериментов, я заметил, что хоть imu и бракованый, но он все-таки может быть использован. Горизонт измеряет корректно, на ускорения реагирует. Нужно только поправить код прошивки ![]() Здесь хочется сделать отступление и заметить, что с точки зрения программиста, качество кода в ArduCopter'е просто отвратительное. Поэтому я совсем не удивился, когда увидел, что при проверке значений используется зашитая в условие сравнения константа. Могли бы уже хотя бы в конфиг ее вынести, но нет, лучше так, прямо в коде сравнивать показания датчика с "магическим" значением. Даже без коментария, откуда число взято. <нехорошие люди>. Впрочем, для опенсорса подобное отношение к коду типично. Пришлось модифицировать код и задавать иные пороговые значения. Это достаточно просто, да и прошивку кастомную залить нетрудно. С первой проблемой разобрались.
Здесь хочется сделать отступление и заметить, что с точки зрения программиста, качество кода в ArduCopter'е просто отвратительное. Поэтому я совсем не удивился, когда увидел, что при проверке значений используется зашитая в условие сравнения константа. Могли бы уже хотя бы в конфиг ее вынести, но нет, лучше так, прямо в коде сравнивать показания датчика с "магическим" значением. Даже без коментария, откуда число взято. <нехорошие люди>. Впрочем, для опенсорса подобное отношение к коду типично. Пришлось модифицировать код и задавать иные пороговые значения. Это достаточно просто, да и прошивку кастомную залить нетрудно. С первой проблемой разобрались.
Потом выяснилось, что в свежих прошивках иногда сбрасываются настройки установленного железа. У меня регулярно пропадали настройки 3DR Power модуля. Терялась инфа о том, что подлючено именно такое питание APM, емкость батареи, сенсор. В очередной раз ковыряться в говнокоде желания не было, пришлось долго гуглить. Толком ничего не нашлось, кроме множественных упоминаний о том, что последняя стабильно летающая прошивка была 3.0.1. Пришлось выкачивать ее код, снова делать фиксы для IMU и заливать.
С этой прошивкой параметры теряться перестали. Можно было настраивать дальше.
Дальше были разборки с minimOSD. Победил почти все, кроме странного поведения при первом запуске, когда на экране отображается емкость батареи в 255% и напряжение -1. Как только немного поддаешь газу, значения исправляются в нормальные. Задержку передачи данных телеметрии устанавливал в несколько секунд, не помогло ((( MinimOSD просто отвратителен. Хотя альтернатив пока нет. Даже DJI iosd основан на том же чипе (MAX7456).
После установки FPV-монитора на пульт (Futaba T8J), внезапно оказалось, что включенный пульт наводит много помех. Однако при взлете коптера помехи снижаются до почти незаметных. Проблема пока не решена, впрочем, она и не сильно мешает.
Еще одна проблема, с которой долго мучался, но так на 100% и не решил - плавают значения стиков по throttle и yaw. Плывут не сильно, в пределах 1-5 единиц, но все равно неприятно. Если будут сильно мешать, придется снова фиксить код - добавлять простой НЧ-фильтр на входные данные, что бы игнорировал мелкие флуктуации сигнала ppm/pwm. Это дешевле, чем купить новый пульт или ломать голову, как снизить электромагнитные наводки (если это в них проблема). Но пока не мешает и ладно.
Первое разочарование в полете - сонар. И хотя были у меня изначально некоторые сомнения, но в реальных условиях он оказался совсем бесполезным. Ну, по крайней мере одиночный сонар с подключением непосредственно к APM. На скриншоте видно, как его колбасит по сравнению с барометром.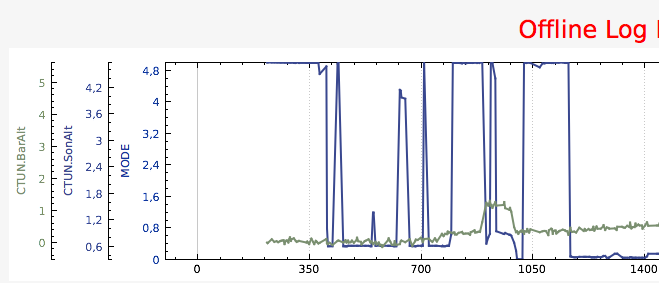
А секрет прост - под коптером трава ![]() Попробую еще пару раз и наверное сниму вообще.
Попробую еще пару раз и наверное сниму вообще.
Немного о полетах.
Ехать за город было лень, поэтому первый раз полетать я решил на небольшом пустыре недалеко от дома.
Stabilize Roll/Pitch уменьшил до 4, иначе с 11x3.7 пропами коптер очень резкий был, один раз перевернулся.
Блинчиком летает нормально. Горизонтальное положение держит хорошо, хотя пиды пришлось подкрутить (11x3.7 пропы для такой рамы вероятно великоваты, попробую 10x5). Высоту держит нормально (с отключенным сонаром).
Пока ковырялся с пидами, сделал 4 захода по 6 минут каждый. Батарея в конце показывала 37%, дома замерял вольтаж - 3.74 на банку.
Калькулятор предрекал 14.1 минуту висения. Врет. Батареи явно хватитает на 20 минут полета.
Полетное видео выложу после установки HD-камеры.
Конфигурация коптера + смета на весь проект доступна здесь - https://docs.google.com/spreadsheets/d/ … 3OTyskkfy0
С момента написания статьи (да, я опубликовал ее раньше на другом сайте), коптер пару раз падал. Один раз увяз в кустах и перевернулся, второй раз упал с высоты метр (отказ батареи). Напечатанный корпус получил повреждения, но цианокрилат отлично клеит ABS пластик ![]() Две поломанные ноги были напечатаны принтером за два часа и заменены за пару минут. Удобно.
Две поломанные ноги были напечатаны принтером за два часа и заменены за пару минут. Удобно.
Сейчас птичка ждет установку камеры и IR-дальномера вместо сонара.
Проект выполнил свою задачу - проверить, пригоден ли к полетам коптер, напечатанный на самом обычном 3D-принтере. Да, пригоден. Стоимость изготовления рамы не сильно выше стоимости пластиковых рам от китайцев. С карбоном конечно не сравнить, но зато огромный простор для экспериментов с конструкцией. Особенно для ленивых людей, которые не любят тратить много времени на пиление, сверление и т.п.
Сейчас занимаюсь проектированием другого печатного коптера. Большего размера, с увеличенным временем полета, защитой от дождя, более компактной компоновкой. Но об этом в другой раз.
Остання редакція TheCluster (2014-10-14 01:44:46)
Неактивний

{kind=link}
#6 2015-03-07 15:02:38
- TheCluster
- Учасник
- Зареєстрований: 2014-10-13
- Повідомлень: 18
Re: Распечатанный на 3D-принтере FPV-квадрокоптер
Класс! А можно подробней, что у вас за 3Д принтер?
Примерно вот такой - http://3dprinter.org.ua/shop/3d-printer … 2-edition/
С множеством моих доработок, как программных, так и аппаратных.
Неактивний
#7 2017-04-03 17:06:07
- forsa
- Учасник

- З Полтава
- Зареєстрований: 2017-04-03
- Повідомлень: 5
Re: Распечатанный на 3D-принтере FPV-квадрокоптер
чувствую 3d принтеры будут скоро повсюду))
наши украинцы создали 3д-автомат наподобие автоматов для кофе которые стоят в ТЦ. почитайте. скоро каждый сможет прийти в магаз и напечатать чтото)
Неактивний
Сторінки 1