Ви не увійшли.
- Теми: Активні | Без відповіді
#26 Re: Проекти » Gamebuino » 2016-10-06 07:51:55
Почитал, интересная штука. Их отгружают уже?
#27 Re: Апаратні питання » Помогите с подключением экрана к ардуино уно » 2016-10-04 10:47:22
Вот распиновка UTFT. 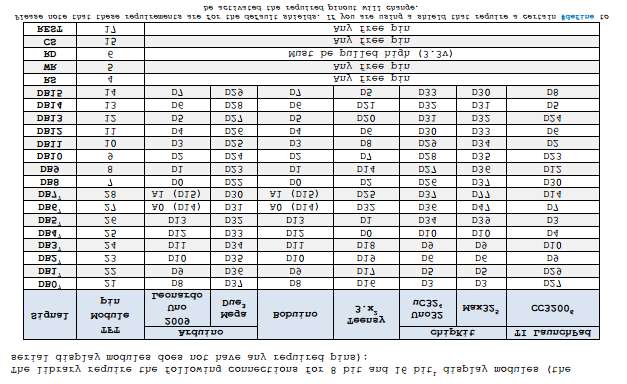
Подключаете подписанные выводы вашего дисплея к соответствующим выводам вашей платы, дисплей инициализируете как
myGLCD(CTE32_R2,38,39,40,41);
где 38,39,40,41 это выводы, к которым у вас подключены RS,WR,CS,RST соответственно. Их можно менять по желанию, остальные, должны быть подключены именно к тем пинам, что указаны на картинке, или придется менять их в дебрях библиотеки.
#28 Re: Апаратні питання » Помогите с подключением экрана к ардуино уно » 2016-10-03 21:28:15
На самой плате подписаны выводы, а в pdf к библиотеке UTFT подписаны, какие выводы ардуины нужно подключать к каким выводам экрана. Для меги это одни, для Уно другие.
#29 Re: Проекти » Большой робот на радио управлении » 2016-08-09 17:11:13
alex_dol пише:Теперь можно приделать у нему GPS модуль и память для сохранения маршрутов - будет сам ездить
Надо будет этот вопрос изучить...
Ставите APM или Pixhawk (http://arduino-ua.com/cat60-poletnie-kontrolleri) плюс GPS и готово - будет сам ездить по введенному маршруту, возвращаться домой при потере пульта управления или просадке напряжения на батарейки т.д. (http://ardupilot.org/rover/index.html)
#30 Re: Апаратні питання » Електронний перемикач (не реле) » 2016-08-02 13:59:59
Так используйте нормально разомкнутый контакт, тогда потреблять оно будет только когда замыкается и работает котел. Потреблять оно будет сущую ерунду.
#31 Re: Апаратні питання » Прошу совета для старта » 2016-08-01 20:07:08
Так это нормально - начали с Ардуино, уперлись, спустились ниже. Так гораздо быстрее чем начинать сразу с программирования под АВР. Я, например, начал с Ардуино, потом начали писать на С, потом на ассемблере под АВР, но когда мне надо быстро что-то написать/проверить, то я опять таки достаю Ардуино. Это не дорога в один конец - начав с более легкого, вы быстрее освоите более сложное.
Но у каждого свой путь, если вам удобней так, то это ваш выбор. Если бюджетно, то я бы посоветовал такой программатор
http://arduino-ua.com/prod305-USBtinyIS … ogrammator
он просто сможет прошивать ваш контроллер. Если есть возможность и настроены серьезно, то можно брать драгон
http://arduino-ua.com/prod374-AVR_Drago … -otladchik
с ним можно полноценно дебажить программу - останавливать с любой точке выполнение, смотреть стек, переменные и прочее.
Тиньки на ардуино.уа только такие, насколько я понял
http://arduino-ua.com/prod1158-otladoch … tiny85-usb
в целом можно взять просто микроконтроллер на том же космодроме или радиомаге и работать от внутреннего генератора.
Макетка - да любая подойдет, по размеру смотрите какие вы проекты планируете на ней строить. Проводков мама и папа возьмите по набору, с них можно сделать уже мама-папа соединив вместе.
#32 Re: Апаратні питання » Проблема с гироскопом MPU-6050 » 2016-07-29 09:35:40
Аксель вообще капризная штука, а 6050, в отличие от 6000 работает только по I2C, насколько я помню, а этот протокол очень подвержен помехам. Думаю движки дают помехи и данные битые приходят. Я бы проверял так:
разнес движки подальше
укоротил бы длину провода к 6050 до минимума (вообще i2c предполагает, что устройства будут на той же плате, а не связаны проводами)
проверял бы контрольную сумму данных с акселя и выводил бы количество ошибок передач (по их наличию можно понять есть ли проблема с помехами)
подключился бы осциллографом к i2c шине и посмотрел какие данные приходят, насколько ровные фронты
#33 Re: Програмування Arduino » Ошибка при компиляции » 2016-07-23 10:54:23
Рад помочь. А что за принтер, если не секрет? Сами собирали?
#34 Re: Програмування Arduino » Ошибка при компиляции » 2016-07-21 16:02:54
Ну вообще без кода тяжело сказать, но если загуглить по строке "error: utility/u8g.h: No such file or directory"
то по первой же ссылке есть варианты решения. Там пишут, что в библиотеке u8g изменилась структура директорий и надо в файле
dogm_font_data_marlin.h
заменить
#include utility/u8g.h
на
#include clib/u8g.h
#35 Re: Апаратні питання » ESP-01 and ESP-12E AT ERROR » 2016-07-09 13:18:00
Фигасе, так на он тут на ардуино.уа 80 грн, зачем на радиорынке в два раза дороже покупать? Или дело в воскресенье было, а "хочучка" не отпускала ![]()
#36 Re: Проекти » История одного 3D принтера (часть 1) » 2015-03-03 23:32:09
Ну как успехи? Напечатал что-то?
#37 Re: Проекти » T-MOTOR U8 своими руками . . . » 2015-03-03 22:17:11
Круть. А как ротор будет изготовлен?
#38 Re: Програмування Arduino » Помогите устранить ошибку компиляции » 2015-02-13 13:53:38
Да, это из-за Setup С большой буквы
#39 Re: Проекти » Распечатанный на 3D-принтере FPV-квадрокоптер » 2015-01-17 14:54:06
Класс! А можно подробней, что у вас за 3Д принтер?
#40 Re: Програмування Arduino » Как и чем собрать прошивку для Uno в DFU режиме » 2014-08-17 14:41:17
Гм, ну компилятором С для АВР по идее. Но это направление, точных шагов не знаю.
#41 Re: Проекти » Modem Terminal 2014 [test] » 2014-07-24 20:03:57
Судя по описанию прикольная программа, но не смог скачать - судя по всему ех.уа уже его удалил, т.к. редиректит на главную.
#42 Re: Проекти » Raspberry PI + GPIO » 2014-07-10 11:50:04
Ого, а чего такой медленный доступ из-под shell?
#43 Re: Проекти » Romeo V2 R3 Старт » 2014-06-25 16:00:43
ЗдОрово! А что за шасси с гусеницами?
#44 Re: Проекти » Bluetooth HC-06 » 2014-06-18 22:17:34
Попробую, спасибо.
#45 Re: Проекти » Bluetooth HC-06 » 2014-06-17 21:42:38
Да я с телефона не пробовал. А ПО использовал стандартное от Windows 7.