Ви не увійшли.
- Теми: Активні | Без відповіді
#26 2016-02-13 14:44:26
- vvr
- Учасник

- Зареєстрований: 2015-04-12
- Повідомлень: 896
Re: Большой робот на радио управлении
видно Petro в гугле забанили ![]()
https://www.sparkfun.com/products/10182
Неактивний
#27 2016-02-13 20:48:51
- Petro
- Учасник
- Зареєстрований: 2015-06-25
- Повідомлень: 79
Re: Большой робот на радио управлении
видно Petro в гугле забанили

https://www.sparkfun.com/products/10182
спасибо за ссылку, но я ищу более понятную инфу-
какие контакты куда подключать
какими сигналами управляется шилд
какими командами программируется
Неактивний
#30 2016-02-14 19:11:57
- vvr
- Учасник
- Зареєстрований: 2015-04-12
- Повідомлень: 896
Re: Большой робот на радио управлении
vvr пише:или вы надеетесь что это будут делать за вас
Эти слова понизили ваш рейтинг в моих глазах...
извините что вас побеспокоил, удачи...
не знаю какие тут рейтинги в ваших глазах, но по вашему вопросу вам дали ссылку, по которой можно посмотреть схему драйвера, его описание, даташит на него, пример работы с ним - что ещё нужно ? ![]()
Неактивний
#31 2016-02-19 12:42:04
- Petro
- Учасник
- Зареєстрований: 2015-06-25
- Повідомлень: 79
Re: Большой робот на радио управлении
Продолжаю работу над роботом:
https://www.youtube.com/watch?v=JWDMCQi6TLI
Неактивний
#32 2016-03-15 19:35:15
- Petro
- Учасник
- Зареєстрований: 2015-06-25
- Повідомлень: 79
Re: Большой робот на радио управлении
Подключение и проверка работы монстр мото шилд:
https://www.youtube.com/watch?v=wFn7IhSOKtg
Неактивний
#33 2016-03-20 13:24:42
- Petro
- Учасник
- Зареєстрований: 2015-06-25
- Повідомлень: 79
Re: Большой робот на радио управлении
Самодельный радио пульт на 1 км
https://www.youtube.com/watch?v=8y7HZEISRsg
Неактивний
#34 2016-03-25 22:36:39
- Petro
- Учасник
- Зареєстрований: 2015-06-25
- Повідомлень: 79
Re: Большой робот на радио управлении
Электроника робота готова:
https://www.youtube.com/watch?v=FU-Ar-D48R0
Неактивний
#35 2016-03-27 19:34:09
- Marat
- Учасник
- Зареєстрований: 2016-01-05
- Повідомлень: 12
Re: Большой робот на радио управлении
Petro, а Вы молодец!
Для своих детей хочу сделать, что-то подобное. Скажите пожалуйста, а какой ток развивают моторы от шуруповёрта от хорошего аккумулятора (без существенной просадки напряжения) в полностью заклиненном состоянии?
Мне лично больше нравится управление на мощных переключающих направление реле и одном мощном транзисторе для управления скоростью на каждый мотор, чем нежные мотор-шилды.
Остання редакція Marat (2016-03-27 19:41:40)
Неактивний
#36 2016-03-28 21:15:20
- Petro
- Учасник
- Зареєстрований: 2015-06-25
- Повідомлень: 79
Re: Большой робот на радио управлении
Petro, а Вы молодец!
Для своих детей хочу сделать, что-то подобное. Скажите пожалуйста, а какой ток развивают моторы от шуруповёрта от хорошего аккумулятора (без существенной просадки напряжения) в полностью заклиненном состоянии?
Мне лично больше нравится управление на мощных переключающих направление реле и одном мощном транзисторе для управления скоростью на каждый мотор, чем нежные мотор-шилды.
Спасибо за комплимент.
Моторы зажимал в руке (до конца остановить не смог - руку жалко) и ток был 9-10 а.
Я тоже думал про вариант на транзисторах и реверс тумблере, но это не понравилось - надо отдельные моторы на тумблеры и это в управлении даст большую задержку для смены направления моторов - пока мне нравится шилд.
Неактивний
#37 2016-03-29 00:00:38
- Marat
- Учасник
- Зареєстрований: 2016-01-05
- Повідомлень: 12
Re: Большой робот на радио управлении
реверс тумблере, но это не понравилось - надо отдельные моторы на тумблеры и это в управлении даст большую задержку
Ни в коем случае не тумблер с механическим приводом от сервы или другого мотора! Я имел ввиду вот такие реле с переключающими контактами: http://arduino-ua.com/prod201-2h_kanalnoe_rele_5V_10A - это на один мотор. Или вот такой, ещё вариант, более доступный по цене сразу для пары моторов: http://arduino-ua.com/prod201-2h_kanalnoe_rele_5V_10A . Транзистор на 55В и 47А, с управлением от 5В можно взять вот такой http://radiocom.dn.ua/radiokomponenty-a … oy-irlz44n
Таким образом получится три 5-ти вольтовых сигнала от Ардуино на управление каждым мотором: 1 - полярность вперед, 2 - полярность назад, 3 - ШИМ для плавного изменения тока двигателя и для отключения во время коммутации реле. Время переключения реле измеряется милисекундами - мотор с массой машины гораздо инерционнее.
С уважением. Марат.
Неактивний
#38 2016-03-29 10:12:43
- Petro
- Учасник
- Зареєстрований: 2015-06-25
- Повідомлень: 79
Re: Большой робот на радио управлении
Petro пише:реверс тумблере, но это не понравилось - надо отдельные моторы на тумблеры и это в управлении даст большую задержку
Ни в коем случае не тумблер с механическим приводом от сервы или другого мотора! Я имел ввиду вот такие реле с переключающими контактами: http://arduino-ua.com/prod201-2h_kanalnoe_rele_5V_10A - это на один мотор. Или вот такой, ещё вариант, более доступный по цене сразу для пары моторов: http://arduino-ua.com/prod201-2h_kanalnoe_rele_5V_10A . Транзистор на 55В и 47А, с управлением от 5В можно взять вот такой http://radiocom.dn.ua/radiokomponenty-a … oy-irlz44n
Таким образом получится три 5-ти вольтовых сигнала от Ардуино на управление каждым мотором: 1 - полярность вперед, 2 - полярность назад, 3 - ШИМ для плавного изменения тока двигателя и для отключения во время коммутации реле. Время переключения реле измеряется милисекундами - мотор с массой машины гораздо инерционнее.
С уважением. Марат.
Такой вариант интересный - возможно и все получится и будет хорошо работать.
Напишите когда сделаете.
Неактивний
#39 2016-04-06 20:56:48
- Petro
- Учасник
- Зареєстрований: 2015-06-25
- Повідомлень: 79
Re: Большой робот на радио управлении
Началась токарка для робота:
https://www.youtube.com/watch?v=flNhuOWbLJ4
Неактивний
#40 2016-04-08 22:20:33
- Petro
- Учасник
- Зареєстрований: 2015-06-25
- Повідомлень: 79
Re: Большой робот на радио управлении
Зборка робота:
https://www.youtube.com/watch?v=hBvnYraOWLM
Неактивний
#41 2016-04-10 09:51:19
- Petro
- Учасник
- Зареєстрований: 2015-06-25
- Повідомлень: 79
Re: Большой робот на радио управлении
Долбежный станок в работе:
https://www.youtube.com/watch?v=ODhWI3Vj2Po
Неактивний
#42 2016-04-13 22:04:39
- Petro
- Учасник
- Зареєстрований: 2015-06-25
- Повідомлень: 79
Re: Большой робот на радио управлении
Цепной привод на передние колеса:
https://www.youtube.com/watch?v=mQZAdNd18Tg
Неактивний
#43 2016-04-14 18:38:05
- Petro
- Учасник
- Зареєстрований: 2015-06-25
- Повідомлень: 79
Re: Большой робот на радио управлении
Переделанный игровой джойстик под радиопульт:
https://www.youtube.com/watch?v=oUl2Xmej4cE
Неактивний
#44 2016-04-17 10:22:42
- Petro
- Учасник
- Зареєстрований: 2015-06-25
- Повідомлень: 79
Re: Большой робот на радио управлении
Робот уже на колесах:
https://www.youtube.com/watch?v=GTUaCNRG88s
Неактивний
#45 2016-04-17 16:11:58
- Marat
- Учасник
- Зареєстрований: 2016-01-05
- Повідомлень: 12
Re: Большой робот на радио управлении
Такой вариант интересный - возможно и все получится и будет хорошо работать.
Напишите когда сделаете.
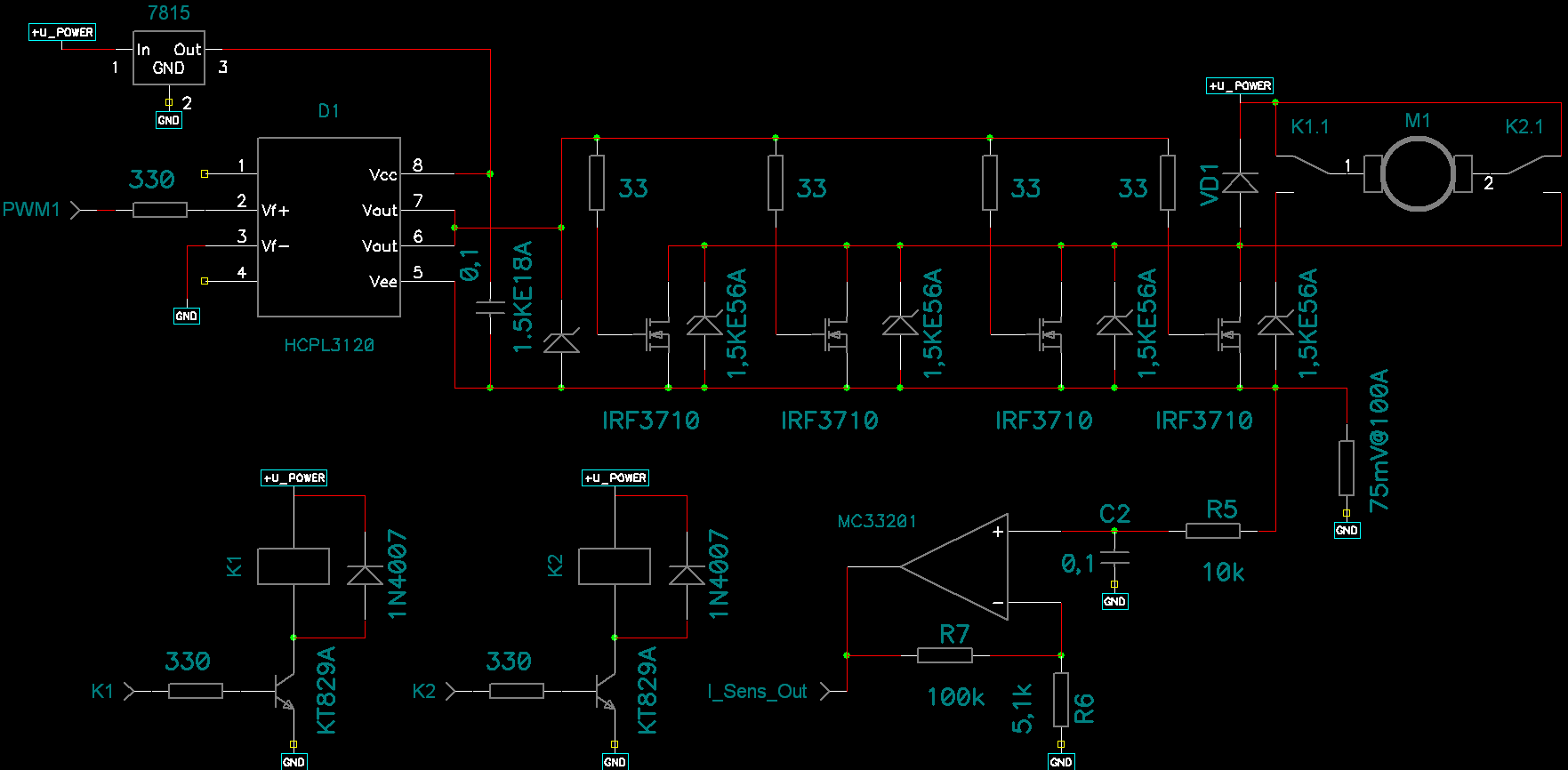
Сделал такую схему - в пятницу, заказчик уже забрал. Фотографий, жаль не сделал. Попробую словами описать:
1. Это немецкий электрический погрузчик Linde, с 2-ми электромоторами на 48В и штатных 100А каждый.
2. Вместо выгоревшей силовой части (в виде отдельного плоского и сверх дорогого оригинального модуля) и такой же немецкой схемы управления был собраны: на МК АТМега8535 - логика управления, а на 20 шт. полевиках IRF3710 и медном бруске - силовой ключ (100В, 400А), драйвер силового ключа на HCPL3120. Защитные мощные диоды для двигателей отдельно закреплены на той же пластине к корпусу через электроизоляцию.
3. Контакторы на управление правым и левым двигателем остались штатные. Их управление осуществляет Мега через КТ829А.
4. Рабочая частота ШИМ - 350Гц. Ограничение по току с помощью шунта и операционного усилителя.
5. Ключ один единственный на два мотора, но так было в оригинале. Я бы поставил по отдельному ключу на каждый реверсивный контактор. До определённого угла поворота задних колёс оба двигателя управляются вперёд или назад, в зависимости от того какую педаль нажал водитель. Если руль вывернут очень сильно, то срабатывают концевые и один двигатель реверсируется контактором - получается разворот на месте с вращением моторов в разные стороны.
Перед самой отгрузкой начал капризничать французский безконтактный датчик педалей газа. Если заказчик захочет, то в будущем придётся его менять на датчик дроссельной заслонки от Таврии или Сенса, - тогда сделаю фотографии всего хозяйства.
Остання редакція Marat (2016-04-17 16:13:24)
Неактивний
#46 2016-04-17 17:26:19
- Petro
- Учасник
- Зареєстрований: 2015-06-25
- Повідомлень: 79
Re: Большой робот на радио управлении
Petro пише:Такой вариант интересный - возможно и все получится и будет хорошо работать.
Напишите когда сделаете.Сделал такую схему - в пятницу, заказчик уже забрал. Фотографий, жаль не сделал. Попробую словами описать:
1. Это немецкий электрический погрузчик Linde, с 2-ми электромоторами на 48В и штатных 100А каждый.
2. Вместо выгоревшей силовой части (в виде отдельного плоского и сверх дорогого оригинального модуля) и такой же немецкой схемы управления был собраны: на МК АТМега8535 - логика управления, а на 20 шт. полевиках IRF3710 и медном бруске - силовой ключ (100В, 400А), драйвер силового ключа на HCPL3120. Защитные мощные диоды для двигателей отдельно закреплены на той же пластине к корпусу через электроизоляцию.
3. Контакторы на управление правым и левым двигателем остались штатные. Их управление осуществляет Мега через КТ829А.
4. Рабочая частота ШИМ - 350Гц. Ограничение по току с помощью шунта и операционного усилителя.
5. Ключ один единственный на два мотора, но так было в оригинале. Я бы поставил по отдельному ключу на каждый реверсивный контактор. До определённого угла поворота задних колёс оба двигателя управляются вперёд или назад, в зависимости от того какую педаль нажал водитель. Если руль вывернут очень сильно, то срабатывают концевые и один двигатель реверсируется контактором - получается разворот на месте с вращением моторов в разные стороны.Перед самой отгрузкой начал капризничать французский безконтактный датчик педалей газа. Если заказчик захочет, то в будущем придётся его менять на датчик дроссельной заслонки от Таврии или Сенса, - тогда сделаю фотографии всего хозяйства.
Солидная работа проделана - снимаю шляпу.
А у меня немного ситуация поменялась - ищу более мощные моторы для робота.
Прийдется искать также другой мото шилд или уже начал обдумывать ваш вариант на транзисторах.
Но тут тоже два варианта:
делать н мост или
транзисторы и релюшки
Я в электронике не очень силен и сам еще не могу расчитать все параметры для комплектующих и саму схему н моста.
Вы бы не могли мне помочь?
Кстати с моторами тоже еще не определился...
Остання редакція Petro (2016-04-17 17:27:39)
Неактивний
#47 2016-04-17 23:35:13
- Marat
- Учасник
- Зареєстрований: 2016-01-05
- Повідомлень: 12
Re: Большой робот на радио управлении
Пётр, не связывайтесь Вы с Н-мостом. Он оправдан, по большому счёту, в системах точного позиционирования, в сервоприводах, когда приходится двигателем удерживать нагрузку около заданного положения, многократно переключая полярность мотора. В Вашем случае - это даже не каждый Божий день работающее устройство, которое максимум 60 раз в минуту, а то и гораздо реже, будет менять направление вращения моторов. К тому же, Вы сможете написать программу управления, чтобы сначала ШИМ убирался до 0, и только после этого выдавалась команда на реверс релюшками, или контакторами, в зависимости от токов моторов, которые Вы выберете под Ваше уже не хилое железо. А это значит, что контакты не будут подгорать и их надёжность будет определяться огромным количеством только их механических эволюций. И то ли Вы соберёте 2 силовых ключа, то ли аж 8 штук, есть разница? Не говоря уже про "прелести" схем управления верхними ключами Н-мостов!
Мощность моторов, наверное, можно посчитать, зная необходимый максимальный крутящий момент на его валу при необходимой скорости вращения. Только не забыть про подъёмы с максимальной нагрузкой.
И когда будет известна необходимая мощность, то можно будет определиться с напряжением и током двигателя. У Вас, кстати, есть уже идеи на счёт источника энергии? Эти параметры важны для расчётов Н-моста, если Вы всё-таки его захотите ваять.
А купленный Вами монстр-шилд можно будет применить в каком-нибудь навесном манипуляторе, например, брёвна ворочать, или держать бензопилу. Эту идею предложил мне мой младший сын (6 лет), чтобы я на старости лет перед каждой зимой сам не лазил за дровами по заросшим лесопосадкам, а посылал туда робота... ![]()
Пётр, а от какой техники Вы используете подшипниковые корпуса? Я тщетно пытаюсь найти хоть какой-нибудь каталог запчастей к сельхозтехнике, потому, как переехал жить в село, и мечтаю собрать небольшой рулонный пресс-подборщик сена и соломы, к маленькому садовому трактору с 15 л.с. Хочется поменьше напрягать токарей, используя готовые серийные вещи. Заранее благодарен.
Остання редакція Marat (2016-04-18 00:41:31)
Неактивний
#48 2016-04-18 08:47:09
- Petro
- Учасник
- Зареєстрований: 2015-06-25
- Повідомлень: 79
Re: Большой робот на радио управлении
Пётр, не связывайтесь Вы с Н-мостом. Он оправдан, по большому счёту, в системах точного позиционирования, в сервоприводах, когда приходится двигателем удерживать нагрузку около заданного положения, многократно переключая полярность мотора. В Вашем случае - это даже не каждый Божий день работающее устройство, которое максимум 60 раз в минуту, а то и гораздо реже, будет менять направление вращения моторов. К тому же, Вы сможете написать программу управления, чтобы сначала ШИМ убирался до 0, и только после этого выдавалась команда на реверс релюшками, или контакторами, в зависимости от токов моторов, которые Вы выберете под Ваше уже не хилое железо. А это значит, что контакты не будут подгорать и их надёжность будет определяться огромным количеством только их механических эволюций. И то ли Вы соберёте 2 силовых ключа, то ли аж 8 штук, есть разница? Не говоря уже про "прелести" схем управления верхними ключами Н-мостов!
Мощность моторов, наверное, можно посчитать, зная необходимый максимальный крутящий момент на его валу при необходимой скорости вращения. Только не забыть про подъёмы с максимальной нагрузкой.
И когда будет известна необходимая мощность, то можно будет определиться с напряжением и током двигателя. У Вас, кстати, есть уже идеи на счёт источника энергии? Эти параметры важны для расчётов Н-моста, если Вы всё-таки его захотите ваять.
А купленный Вами монстр-шилд можно будет применить в каком-нибудь навесном манипуляторе, например, брёвна ворочать, или держать бензопилу. Эту идею предложил мне мой младший сын (6 лет), чтобы я на старости лет перед каждой зимой сам не лазил за дровами по заросшим лесопосадкам, а посылал туда робота...
Пётр, а от какой техники Вы используете подшипниковые корпуса? Я тщетно пытаюсь найти хоть какой-нибудь каталог запчастей к сельхозтехнике, потому, как переехал жить в село, и мечтаю собрать небольшой рулонный пресс-подборщик сена и соломы, к маленькому садовому трактору с 15 л.с. Хочется поменьше напрягать токарей, используя готовые серийные вещи. Заранее благодарен.
Я тоже больше склоняюсь к релюшкам, но пока не видел под мой ток на 50а.
Я с теми подщетами мощности уже растерялся - получается тяга робота около 20кг - вроде очень мало по сравнении с моим минитрактором-вездеходом:
https://www.youtube.com/watch?v=FaLHLwjNU2M
Там примерно 600кг и то он еще и буксует всегда - тяга ограничена весом.
Монстр шилд будет иметь роботу на борту полюбому - с вами согласен.
Сейчас жду на моторы 12-36в и примерно 500вт.
Батарею пока имею одну свинчово-кислотную тяговую 12в 12ач, еще буду докупать наверно такие же.
Подшипники я брал на рынке по 100грн - на каждое колесо по два корпуса, они плавающие и надо их два или один не плавающий корпус на два подшипника или один двухрядный.
Неактивний
#49 2016-04-18 20:19:45
- Marat
- Учасник
- Зареєстрований: 2016-01-05
- Повідомлень: 12
Re: Большой робот на радио управлении
Допустим, колесо Вашего робота имеет диаметр 30см, т.е. 0,3м. Скорость робота, допустим 10км/ч, т.е. 10 000м/ч = 10 000(м/ч)/3600(секунд)=2,8м/секунду. Крутящий момент на колесе при этой скорости – 20кг, т.е. 200 Ньютон. Тяговое усилие немного по-другому считается, но мы упростим расчёты, считая, что колёса у нас не буксуют, что нам не нужно огромную массу везти в гору и т.п.
Ну что ж, посчитаем.
1. Узнаем сколько оборотов в секунду должно совершать колесо, выбранного диаметра, для достижения заданной скорости. 2,8(м/сек) разделим на длину его окружности (которая равна, как говорит геометрия, Пи*Диаметр, т.е. 3,14 * 0,3м = 0,942м). Получим 2,8 / 0,942= 2,97 об/сек. А так как нам нужно подставить в формулу механической мощности угловую скорость, которая измеряется в радианах в секунду, то умножим наши почти привычные обороты в секунду на 2*Пи (т.к. та же геометрия кричит, что угол в 180 градусов – это Пи, а угол в 360 градусов – соответственно 2*Пи). Получим 2,97об/сек * 2* 3,14 = 18,65 радиан в секунду.
2. Теперь определим необходимый крутящий момент на валу колеса, который измеряется в Ньютонах*метр рычага, к которому эта адская сила приложена. Длина рычага у нас составляет половину диаметра, т.е. 0,15м, а сила 200Н. Получаем крутящий момент на колесе 200(Н)*0,15(м)=30Н*м.
3. Считаем мощность на валу колеса 30Н*м * 18,65рад/с = 559,5Вт. А мощность двигателя мы определим, разделив необходимую нам мощность на колесе на все коэффициенты полезного действия всех передач, редукторов и самого двигателя. Допустим, 0,9*0,9*0,9. Получим мощность двигателя 560Вт/0,729=768Вт.
Таким образом, Ваши 2 мотора по 500вт каждый – совсем рядом с идеализированным расчётом. ![]()
Реле на 80А и 12 или 24В для катушки управления можно взять на автомобильном рынке. Эти релюхи используются для подогрева воздуха в цилиндрах дизелей свечами накала. Бывают с переключающими силовыми контактами – вот такие и нужны, 5-ти контактные (2 контакта – это катушка) по 2 штуки на каждый Ваш двигатель.
Если Вы будете использовать мотор-колёса от велосипедов, то с ними, обычно, идут свои контроллеры, т.к. там трёхфазные синхронные двигатели с обратной связью по положению колеса и оборотам. Нужно только придумать, как управлять с Ардуино этими контроллерами. Себе хотел на 48В 500Вт такой мотор, для строительства вертикального ветряка с ротором Угринского. Жаба пока душит, и некогда заняться.
Неактивний
#50 2016-04-18 21:43:22
- Petro
- Учасник
- Зареєстрований: 2015-06-25
- Повідомлень: 79
Re: Большой робот на радио управлении
Допустим, колесо Вашего робота имеет диаметр 30см, т.е. 0,3м. Скорость робота, допустим 10км/ч, т.е. 10 000м/ч = 10 000(м/ч)/3600(секунд)=2,8м/секунду. Крутящий момент на колесе при этой скорости – 20кг, т.е. 200 Ньютон. Тяговое усилие немного по-другому считается, но мы упростим расчёты, считая, что колёса у нас не буксуют, что нам не нужно огромную массу везти в гору и т.п.
Ну что ж, посчитаем.
1. Узнаем сколько оборотов в секунду должно совершать колесо, выбранного диаметра, для достижения заданной скорости. 2,8(м/сек) разделим на длину его окружности (которая равна, как говорит геометрия, Пи*Диаметр, т.е. 3,14 * 0,3м = 0,942м). Получим 2,8 / 0,942= 2,97 об/сек. А так как нам нужно подставить в формулу механической мощности угловую скорость, которая измеряется в радианах в секунду, то умножим наши почти привычные обороты в секунду на 2*Пи (т.к. та же геометрия кричит, что угол в 180 градусов – это Пи, а угол в 360 градусов – соответственно 2*Пи). Получим 2,97об/сек * 2* 3,14 = 18,65 радиан в секунду.
2. Теперь определим необходимый крутящий момент на валу колеса, который измеряется в Ньютонах*метр рычага, к которому эта адская сила приложена. Длина рычага у нас составляет половину диаметра, т.е. 0,15м, а сила 200Н. Получаем крутящий момент на колесе 200(Н)*0,15(м)=30Н*м.
3. Считаем мощность на валу колеса 30Н*м * 18,65рад/с = 559,5Вт. А мощность двигателя мы определим, разделив необходимую нам мощность на колесе на все коэффициенты полезного действия всех передач, редукторов и самого двигателя. Допустим, 0,9*0,9*0,9. Получим мощность двигателя 560Вт/0,729=768Вт.Таким образом, Ваши 2 мотора по 500вт каждый – совсем рядом с идеализированным расчётом.
Реле на 80А и 12 или 24В для катушки управления можно взять на автомобильном рынке. Эти релюхи используются для подогрева воздуха в цилиндрах дизелей свечами накала. Бывают с переключающими силовыми контактами – вот такие и нужны, 5-ти контактные (2 контакта – это катушка) по 2 штуки на каждый Ваш двигатель.Если Вы будете использовать мотор-колёса от велосипедов, то с ними, обычно, идут свои контроллеры, т.к. там трёхфазные синхронные двигатели с обратной связью по положению колеса и оборотам. Нужно только придумать, как управлять с Ардуино этими контроллерами. Себе хотел на 48В 500Вт такой мотор, для строительства вертикального ветряка с ротором Угринского. Жаба пока душит, и некогда заняться.
Спасибо за расчет.
Я так считал:
Мотор 500 вт при 2200 об в мин имеет момент примерно 2нм, это примерно 0,2кгсм.
для получения скорости 10 км в час (диаметр колеса почти 40см).
надо 2200/16(редукция цепи)*1,2(длина окружности колеса)*60(минуты переводим в час)/1000(метры переводим в км)=9,9км в час
теперь тяга:
0,2*16/0,2(радиус колеса)= 16кгс
а тяга от двух моторов = 16*2=32 кгс
Или примерно 320н.
При весе робота даже в 100кг моторы не смогут даже сорвать колеса в букс - это печально.
Рассматриваю вариант уменьшения скорости до 5 км в час и получения тяги около 60кг или ставить буду 4 мотора.
А по поводу релюшек:
Мне бы такие на 6 силовых контактов, что бы сразу можно было переключить мотор на обратную полярность, не встречали таких?
Неактивний