Ви не увійшли.
- Теми: Активні | Без відповіді
Сторінки 1
#1 Re: Проекти » Большой робот на радио управлении » 2016-05-16 21:14:59
Я сейчас настроился на ваш вариант управления, но не могу найти реле на 30-40а.
Вы такого не встречали?
Полные авторынки завалены такими релюшками. Хотите с катушками на 12В, хотите на 24В. Нужны с переключающими контактами - так называемые "пятиконтактные реле". как раз на 30-40А. А есть и на 80А - это для питания свечей накала дизелей. Тоже на 5 котактов бывают.
С напряжением моторов определились окончательно?
Катушки таких реле нужно включить через транзисторы, мне например, нравятся в таких случаях, составные КТ829А, или их аналог TIP102.
С уважением. Марат.
#2 Re: Проекти » Большой робот на радио управлении » 2016-04-19 07:39:17
Пётр, а зачем реле на 6 силовых контактов? Цифровые выводы Ардуино экономите? С 2-ми релюхами у Вас есть 3 режима управления: вперёд, назад, два положения динамического тормоза. Если Вам нужно только вперёд и только назад от одного сигнала, то можно 2 релюшки соединить катушками параллельно, а силовые контакты перекоммутировать соответствующим образом к + и к - источника питания.
#3 Re: Проекти » Большой робот на радио управлении » 2016-04-18 20:19:45
Допустим, колесо Вашего робота имеет диаметр 30см, т.е. 0,3м. Скорость робота, допустим 10км/ч, т.е. 10 000м/ч = 10 000(м/ч)/3600(секунд)=2,8м/секунду. Крутящий момент на колесе при этой скорости – 20кг, т.е. 200 Ньютон. Тяговое усилие немного по-другому считается, но мы упростим расчёты, считая, что колёса у нас не буксуют, что нам не нужно огромную массу везти в гору и т.п.
Ну что ж, посчитаем.
1. Узнаем сколько оборотов в секунду должно совершать колесо, выбранного диаметра, для достижения заданной скорости. 2,8(м/сек) разделим на длину его окружности (которая равна, как говорит геометрия, Пи*Диаметр, т.е. 3,14 * 0,3м = 0,942м). Получим 2,8 / 0,942= 2,97 об/сек. А так как нам нужно подставить в формулу механической мощности угловую скорость, которая измеряется в радианах в секунду, то умножим наши почти привычные обороты в секунду на 2*Пи (т.к. та же геометрия кричит, что угол в 180 градусов – это Пи, а угол в 360 градусов – соответственно 2*Пи). Получим 2,97об/сек * 2* 3,14 = 18,65 радиан в секунду.
2. Теперь определим необходимый крутящий момент на валу колеса, который измеряется в Ньютонах*метр рычага, к которому эта адская сила приложена. Длина рычага у нас составляет половину диаметра, т.е. 0,15м, а сила 200Н. Получаем крутящий момент на колесе 200(Н)*0,15(м)=30Н*м.
3. Считаем мощность на валу колеса 30Н*м * 18,65рад/с = 559,5Вт. А мощность двигателя мы определим, разделив необходимую нам мощность на колесе на все коэффициенты полезного действия всех передач, редукторов и самого двигателя. Допустим, 0,9*0,9*0,9. Получим мощность двигателя 560Вт/0,729=768Вт.
Таким образом, Ваши 2 мотора по 500вт каждый – совсем рядом с идеализированным расчётом. ![]()
Реле на 80А и 12 или 24В для катушки управления можно взять на автомобильном рынке. Эти релюхи используются для подогрева воздуха в цилиндрах дизелей свечами накала. Бывают с переключающими силовыми контактами – вот такие и нужны, 5-ти контактные (2 контакта – это катушка) по 2 штуки на каждый Ваш двигатель.
Если Вы будете использовать мотор-колёса от велосипедов, то с ними, обычно, идут свои контроллеры, т.к. там трёхфазные синхронные двигатели с обратной связью по положению колеса и оборотам. Нужно только придумать, как управлять с Ардуино этими контроллерами. Себе хотел на 48В 500Вт такой мотор, для строительства вертикального ветряка с ротором Угринского. Жаба пока душит, и некогда заняться.
#4 Re: Проекти » Большой робот на радио управлении » 2016-04-17 23:35:13
Пётр, не связывайтесь Вы с Н-мостом. Он оправдан, по большому счёту, в системах точного позиционирования, в сервоприводах, когда приходится двигателем удерживать нагрузку около заданного положения, многократно переключая полярность мотора. В Вашем случае - это даже не каждый Божий день работающее устройство, которое максимум 60 раз в минуту, а то и гораздо реже, будет менять направление вращения моторов. К тому же, Вы сможете написать программу управления, чтобы сначала ШИМ убирался до 0, и только после этого выдавалась команда на реверс релюшками, или контакторами, в зависимости от токов моторов, которые Вы выберете под Ваше уже не хилое железо. А это значит, что контакты не будут подгорать и их надёжность будет определяться огромным количеством только их механических эволюций. И то ли Вы соберёте 2 силовых ключа, то ли аж 8 штук, есть разница? Не говоря уже про "прелести" схем управления верхними ключами Н-мостов!
Мощность моторов, наверное, можно посчитать, зная необходимый максимальный крутящий момент на его валу при необходимой скорости вращения. Только не забыть про подъёмы с максимальной нагрузкой.
И когда будет известна необходимая мощность, то можно будет определиться с напряжением и током двигателя. У Вас, кстати, есть уже идеи на счёт источника энергии? Эти параметры важны для расчётов Н-моста, если Вы всё-таки его захотите ваять.
А купленный Вами монстр-шилд можно будет применить в каком-нибудь навесном манипуляторе, например, брёвна ворочать, или держать бензопилу. Эту идею предложил мне мой младший сын (6 лет), чтобы я на старости лет перед каждой зимой сам не лазил за дровами по заросшим лесопосадкам, а посылал туда робота... ![]()
Пётр, а от какой техники Вы используете подшипниковые корпуса? Я тщетно пытаюсь найти хоть какой-нибудь каталог запчастей к сельхозтехнике, потому, как переехал жить в село, и мечтаю собрать небольшой рулонный пресс-подборщик сена и соломы, к маленькому садовому трактору с 15 л.с. Хочется поменьше напрягать токарей, используя готовые серийные вещи. Заранее благодарен.
#5 Re: Проекти » Большой робот на радио управлении » 2016-04-17 16:11:58
Такой вариант интересный - возможно и все получится и будет хорошо работать.
Напишите когда сделаете.
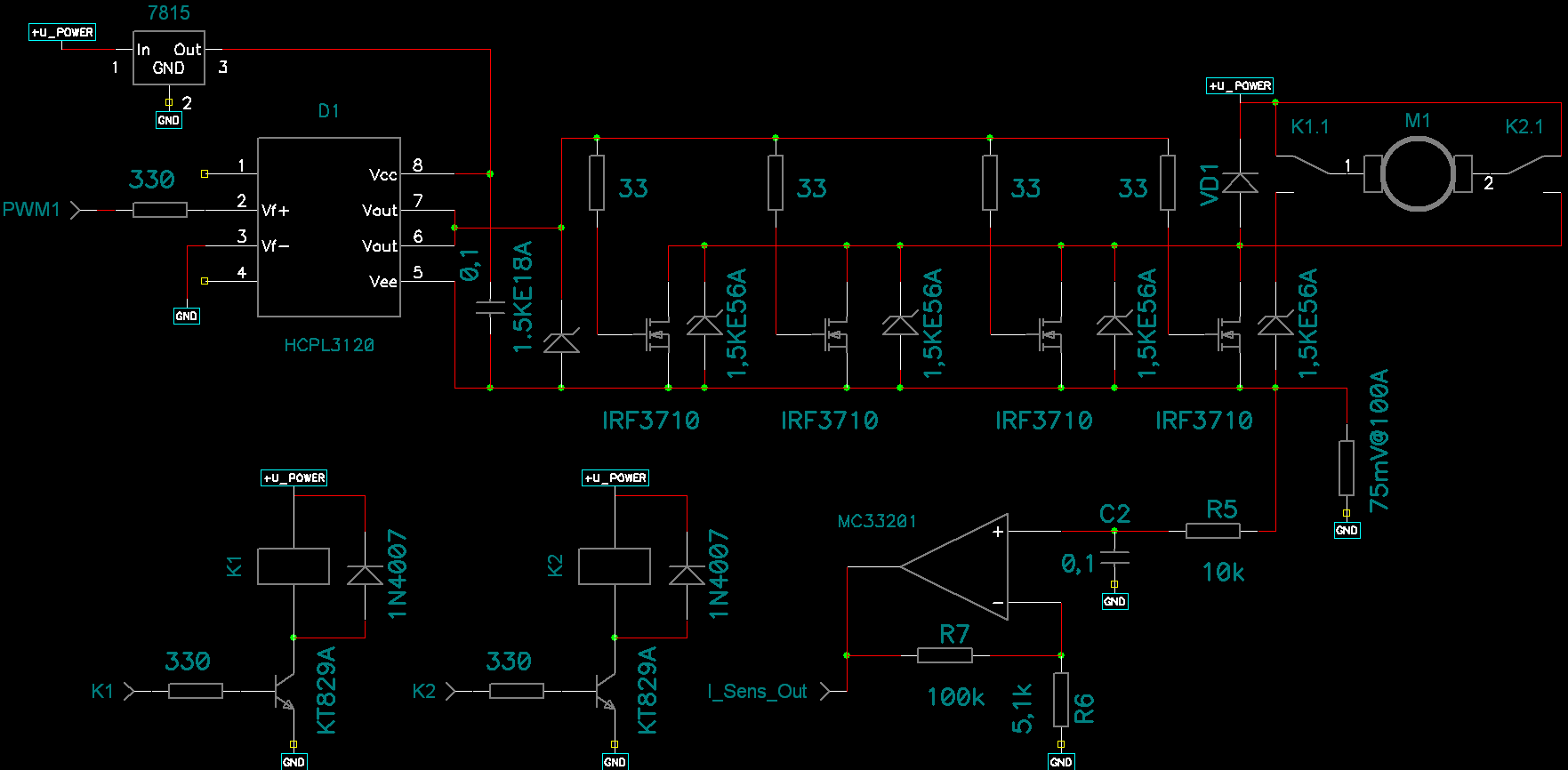
Сделал такую схему - в пятницу, заказчик уже забрал. Фотографий, жаль не сделал. Попробую словами описать:
1. Это немецкий электрический погрузчик Linde, с 2-ми электромоторами на 48В и штатных 100А каждый.
2. Вместо выгоревшей силовой части (в виде отдельного плоского и сверх дорогого оригинального модуля) и такой же немецкой схемы управления был собраны: на МК АТМега8535 - логика управления, а на 20 шт. полевиках IRF3710 и медном бруске - силовой ключ (100В, 400А), драйвер силового ключа на HCPL3120. Защитные мощные диоды для двигателей отдельно закреплены на той же пластине к корпусу через электроизоляцию.
3. Контакторы на управление правым и левым двигателем остались штатные. Их управление осуществляет Мега через КТ829А.
4. Рабочая частота ШИМ - 350Гц. Ограничение по току с помощью шунта и операционного усилителя.
5. Ключ один единственный на два мотора, но так было в оригинале. Я бы поставил по отдельному ключу на каждый реверсивный контактор. До определённого угла поворота задних колёс оба двигателя управляются вперёд или назад, в зависимости от того какую педаль нажал водитель. Если руль вывернут очень сильно, то срабатывают концевые и один двигатель реверсируется контактором - получается разворот на месте с вращением моторов в разные стороны.
Перед самой отгрузкой начал капризничать французский безконтактный датчик педалей газа. Если заказчик захочет, то в будущем придётся его менять на датчик дроссельной заслонки от Таврии или Сенса, - тогда сделаю фотографии всего хозяйства.
#6 Re: Проекти » управление бт машинкой ПРО МИНИ + плата драйвера L298N + 2 DC мотора. » 2016-03-29 00:16:46
сколько же вас грамотных и все, наверное самоучки, и учитель у всех - интернет... А я сажусь заливать в машинку свои куралесы, малый приходит "Дай!"... Потому и прошу подсказать, куда двигаться.
И еще: есть ли возможность и как, подключив дуину к компу увидеть, какие сигналы приходят (и приходят ли) на неё по зубу? Может не в скетче дело, а в андроиде? (хотя в это я почти не верю).
Я действительно самоучка. Только тогда интернетов было мало... Фидонет только начиналась. В своих куралесах Вы бы разобрались, а проблема в том, что Вам нужно заставить работать ЧУЖУЮ программу. Не понимая как она устроена, из каких операторов состоит - это как выслушивание китайской речи, ни разу не заглянув даже в разговорник.
Своему старшему сыну я тоже купил Ардуино в виде набора Матрёшки, чтобы оба сына приходили и говорили "Дай, покажи и расскажи!". Это очень удивительно интересное занятие вместе учиться новому! Даже младший, не умеющий читать пришёл и попросил научить его собирать, понимать и рисовать схемы, ибо школой ещё не отучен от знаний, ещё свежо стремление быть взрослым, т.е. уметь то, что делают взрослые.
Если Вы хотите научиться всему тому, о чём спрашиваете (и даже большему), то лучший, известный мне, видеокурс по Ардуино у МФТИ "Строим роботов на Ардуино от светофора до 3Д принтера" https://ru.coursera.org/learn/roboty-arduino
С уважением. Марат.
#7 Re: Проекти » Большой робот на радио управлении » 2016-03-29 00:00:38
реверс тумблере, но это не понравилось - надо отдельные моторы на тумблеры и это в управлении даст большую задержку
Ни в коем случае не тумблер с механическим приводом от сервы или другого мотора! Я имел ввиду вот такие реле с переключающими контактами: http://arduino-ua.com/prod201-2h_kanalnoe_rele_5V_10A - это на один мотор. Или вот такой, ещё вариант, более доступный по цене сразу для пары моторов: http://arduino-ua.com/prod201-2h_kanalnoe_rele_5V_10A . Транзистор на 55В и 47А, с управлением от 5В можно взять вот такой http://radiocom.dn.ua/radiokomponenty-a … oy-irlz44n
Таким образом получится три 5-ти вольтовых сигнала от Ардуино на управление каждым мотором: 1 - полярность вперед, 2 - полярность назад, 3 - ШИМ для плавного изменения тока двигателя и для отключения во время коммутации реле. Время переключения реле измеряется милисекундами - мотор с массой машины гораздо инерционнее.
С уважением. Марат.
#8 Re: Проекти » управление бт машинкой ПРО МИНИ + плата драйвера L298N + 2 DC мотора. » 2016-03-27 22:27:50
Не понимаю я готовых решений типа: скопировал, залил - заработало. Программирование дарит человеку 2 радости: 1. Радость понимания того, что ты, и как ты это делаешь (радость самого процесса познания), и 2. Радость, когда всё заработало (т.е. радость победы, и над собой в т.ч.).
СтОит разрисовать и понять схему подключения того, что не работает. И по каждому сигналу разобраться с тем, что и как должно быть подключено и обработано программой. Не нужно валить всё в кучу ради быстрого оргазма. ИМХО.
#9 Re: Проекти » Зарядное устройство-десульфатор » 2016-03-27 20:01:31
Объясните мне, пожалуйста, как управляется транзистор разряда, если относительно земли на нагрузке падает всё напряжение АКБ?
#10 Re: Проекти » Большой робот на радио управлении » 2016-03-27 19:34:09
Petro, а Вы молодец!
Для своих детей хочу сделать, что-то подобное. Скажите пожалуйста, а какой ток развивают моторы от шуруповёрта от хорошего аккумулятора (без существенной просадки напряжения) в полностью заклиненном состоянии?
Мне лично больше нравится управление на мощных переключающих направление реле и одном мощном транзисторе для управления скоростью на каждый мотор, чем нежные мотор-шилды.
#11 Re: Програмування Arduino » Помогите оживить новенький Arduino Uno R3 » 2016-03-27 18:56:58
LogicKiller, вопрос был ко мне или к Йожэгу?
Ардуинку восстановили по гарантии в магазине. Слетел загрузчик и его биты. Получил, и сразу же сохранил фьюзы и прошивку с помощью AVR910 и CVAVR. Спасибо за участие. Жаль архив с backup'ом нельзя сюда вставить...
#12 Програмування Arduino » Помогите оживить новенький Arduino Uno R3 » 2016-01-05 13:51:39
- Marat
- відповідей: 3
Купил сыновьям набор Матрёшка Z. Через неделю во время заливки очередного скетча прервала свою работу Arduino IDE. Теперь плата не программируется ни под каким соусом. Оба контроллера Ардуины (ATMega16U2 и ATMega328P) - живые. Есть в наличии CodeVision AVR 3.10 и USB программатор AVR910. Может у кого-то есть возможность с аналогичной платы считать прошивки и фьюзы обеих микросхем? Поделитесь, пожалуйста! Судя по всему, не работает должным образом ATMega16U2, та что преобразовывает USB в TTL, т.к. на входах TX и RX ATMega328P осциллограф ничего не видит.
Возвращать в магазин весь набор нет желания. В самом магазине не смогли помочь с прошивками. Купить у них клон этой Ардуины, тоже не получилось - нет в наличии, а когда появится, то возможно я уже уеду из Украины, оставив детей с мёртвым конструктором за 2000 грн.
Выполнять программы, написанные в CVAVR Мега328 может исправно (если зажать Ресет у Меги16U2), но теряется весь смысл простых скетчей Ардуины, и большая часть упражнений самого набора. И хотя CVAVR является более мощным и проверенным инструментом для Атмелов- всё же для новичков это довольно сложновато на старте.
С уважением. Марат Лысенко.
Сторінки 1