Ви не увійшли.
- Теми: Активні | Без відповіді
Сторінки 1
#1 Re: Апаратні питання » K-POWER Цифровой серво-привод DM0900 » 2024-01-08 20:59:36
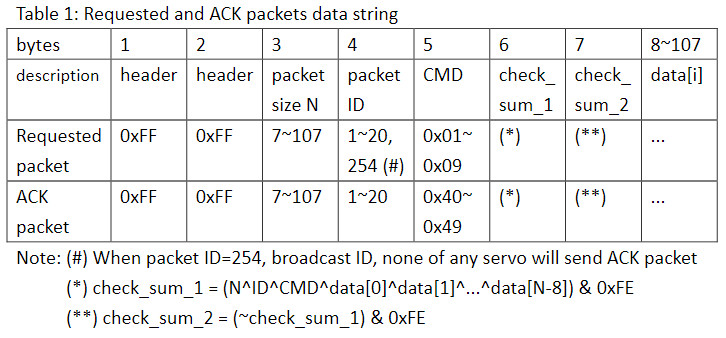
check_sum_1 = (N^ID^CMD^data[0]^data[1]^...^data[N-8]) & 0xFE - (N XOR ID XOR CMD XOR data[0] XOR data[1] XOR ... XOR data[N-8]) И 0xFE
сheck_sum_2 = (~check_sum_1) & 0xFE - (~check_sum_1) И 0xFE
Я правильно понял, все через логическое XOR и в конце, через И ?
#2 Re: Апаратні питання » K-POWER Цифровой серво-привод DM0900 » 2024-01-08 10:22:07
А він точно з керуванням по послідовному протоколу?
На сайті виробника по назві DM0900 знаходиться два серво:
DM0900 10.5KG Digital Metal Gear Servo
Digital Metal Gear Servo DM0900
Обидва з PWM-керуванням. У маркетологів PWM також вважається "digital"
Може в описі товару тупо переплутали, написавши про послідовну шину. Таке буває.
PWM так же пробовал, результа 0
MG996R - работает норм по ШИМ
https://youtube.com/shorts/umBPXf9SeYQ
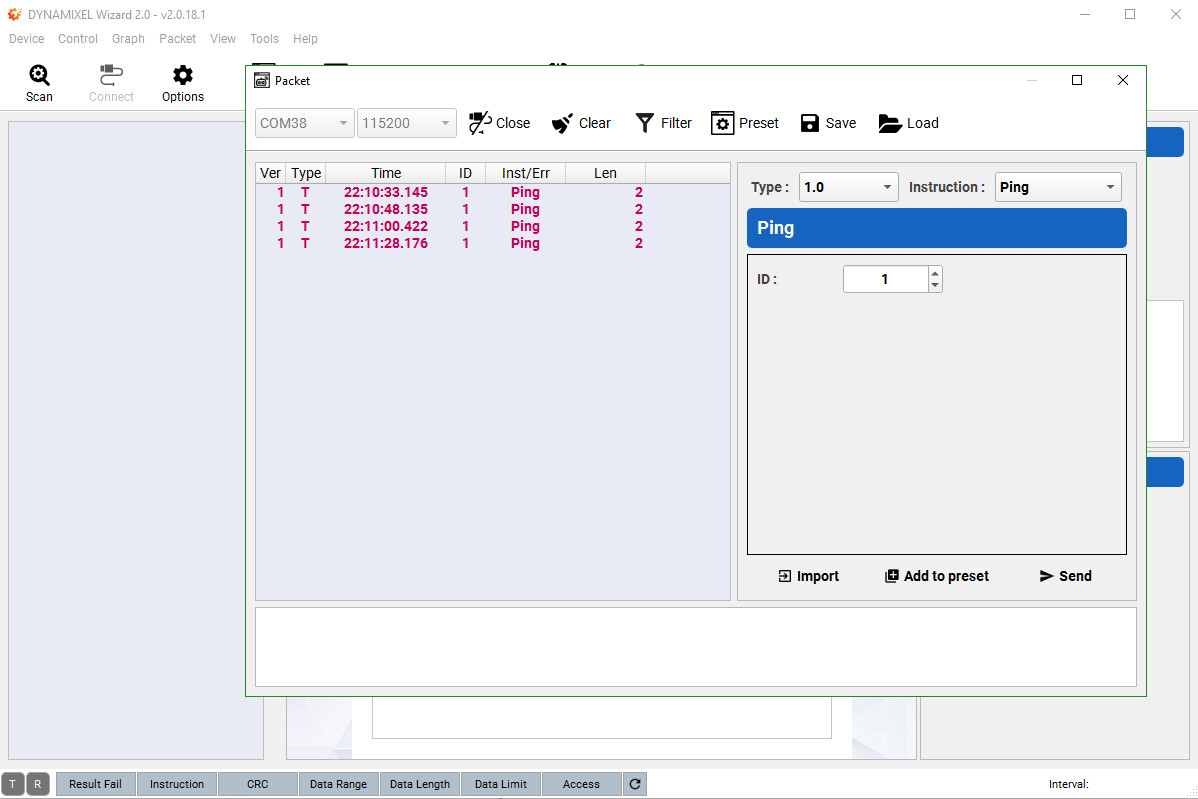
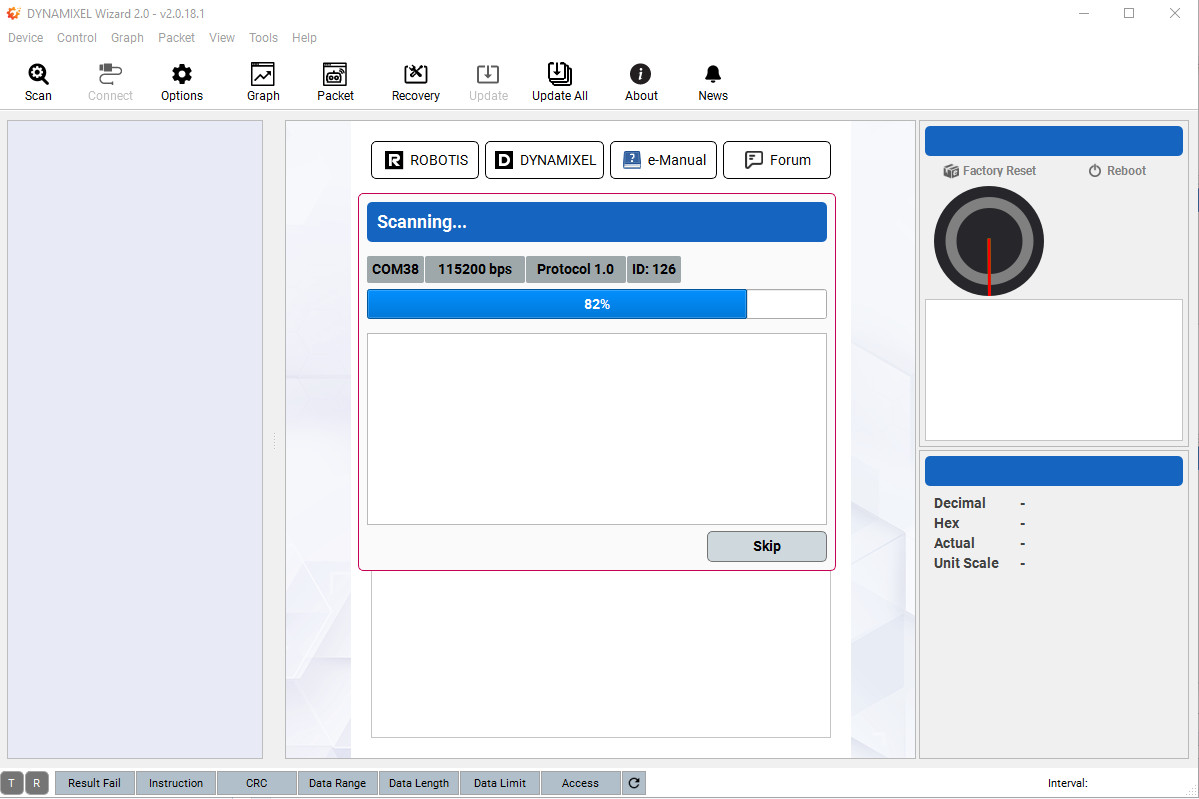
Так, програма у вас видає Dynamixel Protocol 1.0.
Ще є Protocol 2.0. А на сторінці товару посилання на даташит для A1-16, де протокол схожий, але несумісний ні з Dynamixel 1.0, ні з 2.0. Кожен виробник модифікує протокол як хоче, аби було несумісно з продукцією конкурентів.
Протоколы все перепробовал, качал еще пару альтернативных программ
Так же, что нашел по примерам ардуино, все глухо.
Теоретично, якщо зі сторони серво відкритий колектор з підтяжкою
Нет подтяжки.
На плате сервопривода, два резистора 1кОм припаяны вместе, отводы распаяны на разные входы микросхемы.
#3 Re: Апаратні питання » K-POWER Цифровой серво-привод DM0900 » 2024-01-08 00:57:43
9.6 МГц і фʼюз CKDIV8
9.6 , делитель снят, тоесть на полной скорости
#4 Re: Апаратні питання » K-POWER Цифровой серво-привод DM0900 » 2024-01-08 00:41:09
Не та версія протокола?
Родной бы документ от него, или хотя бы рабочий проект, там бы возможно разобрался бы по командам
Документ, что прилагается не от него, от похожего
https://www.pololu.com/file/0J1212/A1-16_datasheet_20151229.pdf
// Attiny в ролі буфера з відкритим колектором - це сильно
Готового решения сразу не нашел )
Хотя ранее были https://arduino.ua/ru/prod3963-ttlusb-adapter-dlya-ypravleniya-servoprivodom-sovmestima-s-arduino
Ну и на соседних есть, как оказалось https://electroradiogroup.com.ua/ua/p2008450927-adapter-ttlusb-dlya.html
#5 Re: Апаратні питання » K-POWER Цифровой серво-привод DM0900 » 2024-01-07 23:42:18
Покажіть cхему підключення
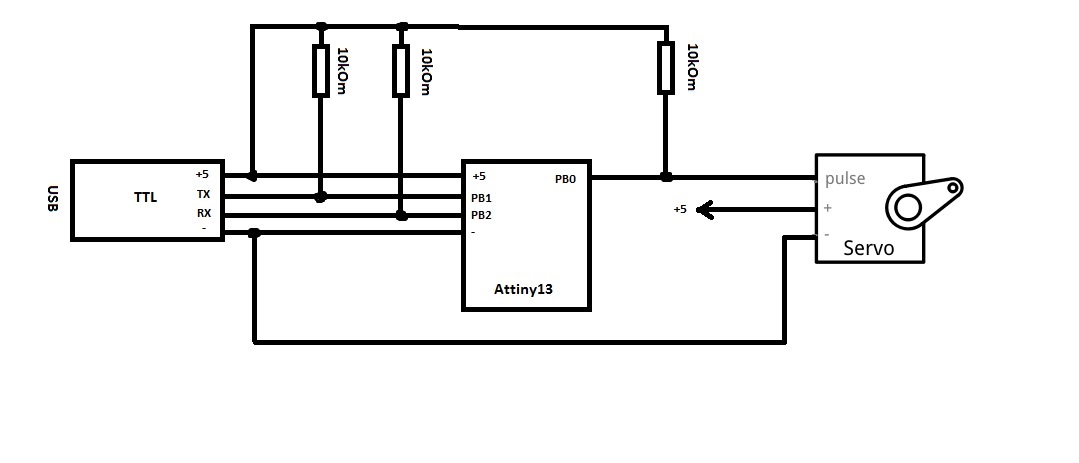
Прошивка переходника на Attiny13A
.DSEG ; Сегмент ОЗУ
.CSEG
.org 0 ;Задание нулевого адреса старта программы
rjmp reset ;Безусловный переход к метке reset
.org 1
reti ;Prer
.org 2
reti ;Pin Change Interrupt0
.org 3
reti ;timer0_ovf
.org 4
reti ;EEPROM write complete
.org 5
reti ;Analog Comparator Interrupt
.org 6
reti ;timerA;Timer_Counter0A; Compare Match A
.org 7
reti ;Timer_Counter0B; Compare Match B
.org 8
reti ;Watchdog Timeout
.org 9
reti ;conversion;ADC Conversion Complete Handle
reset:
wdr; Reset Watchdog Timer
;ldi r16,24
;out WDTCR, r16;
;ldi r16,12
;out WDTCR, r16;
LDI ZL,Low(SRAM_START) ; Адрес начала ОЗУ в индекс
LDI ZH,High(SRAM_START)
CLR R16 ; Очищаем R16
Flush: ST Z+,R16 ; Сохраняем 0 в ячейку памяти
CPI ZH,High(RAMEND+1) ; Достигли конца оперативки?
BRNE Flush ; Нет? Крутимся дальше!
CPI ZL,Low(RAMEND+1) ; А младший байт достиг конца?
BRNE Flush
CLR ZL ; Очищаем индекс
CLR ZH
LDI ZL, 30 ; Адрес самого старшего регистра
CLR ZH ; А тут у нас будет ноль
DEC ZL ; Уменьшая адрес
ST Z, ZH ; Записываем в регистр 0
BRNE PC-2 ; Пока не перебрали все не успокоились
ldi r16, RAMEND ;Загрузка в регистр r16 адреса верхней границы ОЗУ
out SPL, r16
cbi DDRB, 0
cbi PORTB, 0
cbi DDRB, 1
cbi PORTB, 1
cbi DDRB, 2
cbi PORTB, 2
cbi DDRB, 3
cbi PORTB, 3
cbi DDRB, 4
sbi PORTB, 4
ldi r16,0
main:
sbic PINB,1 ;пропустить если бит в регистре очищен
rjmp t_in_test
sbi DDRB, 0 ; установить
cbi DDRB, 2 ;out очистить
cbr r16, 1 ; очистить бит 0 в r16
rjmp main
t_in_test:
sbrc r16, 0 ; Пропустить если бит 0 в r16 очищен
rjmp rxrid
cbi DDRB, 0 ; очистить
sbr r16, 1 ; Установить бит 0 в r16
nop
nop
nop
nop
rjmp main
rxrid:
sbic PINB,0 ;пропустить если бит в регистре очищен
rjmp rx_test
sbi DDRB, 2 ; установить
cbr r16, 2 ; очистить бит 1 в r16
rjmp main
rx_test:
sbrc r16, 1 ; Пропустить если бит 1 в r16 очищен
rjmp main
cbi DDRB, 2 ; очистить
sbr r16, 2 ; Установить бит 1 в r16
nop
nop
nop
nop
rjmp mainАналог схемы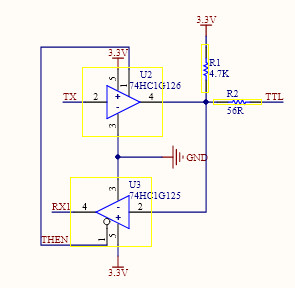
https://arduino.ua/files/1_USB-TTL_sch.pdf

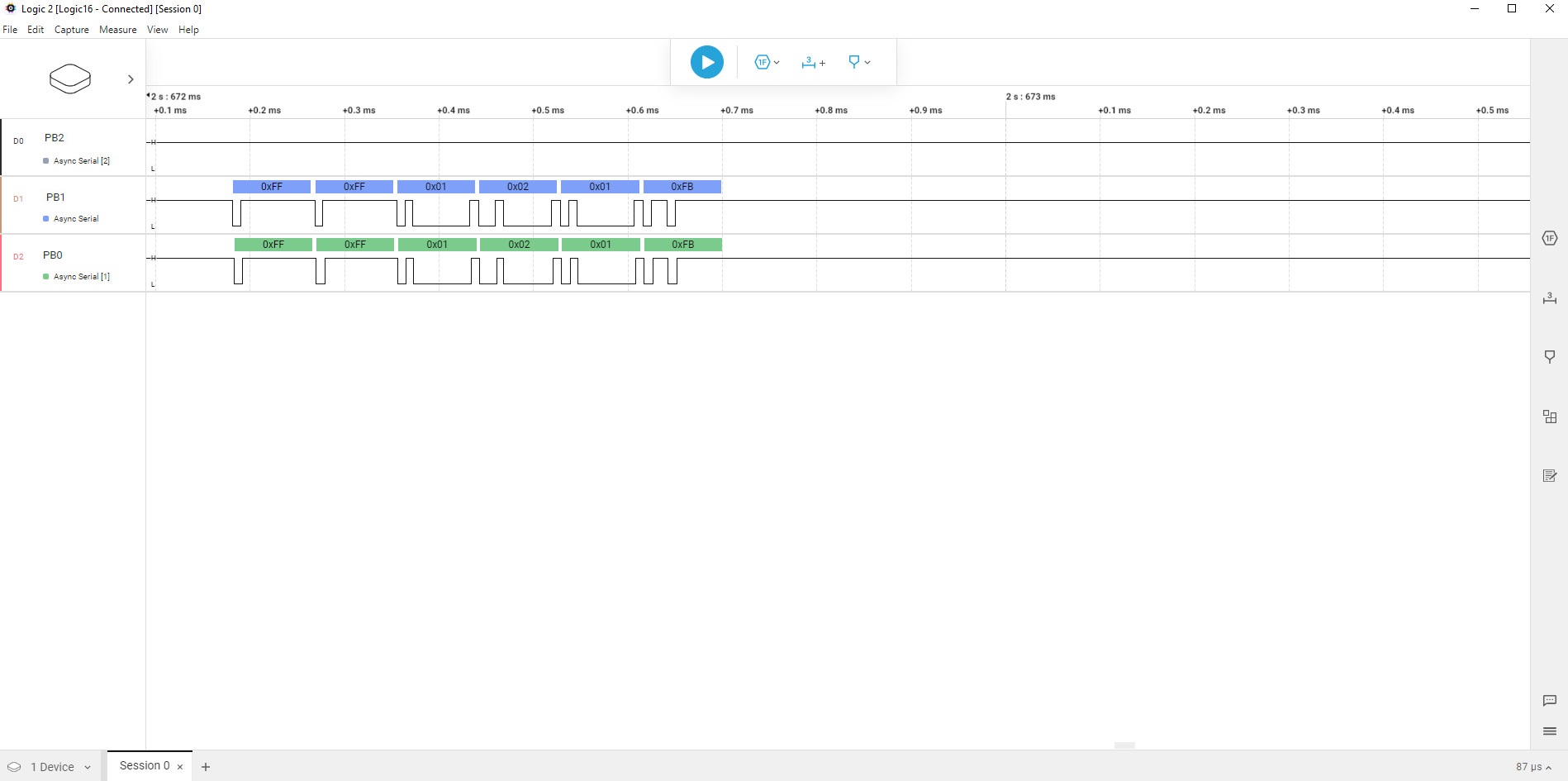
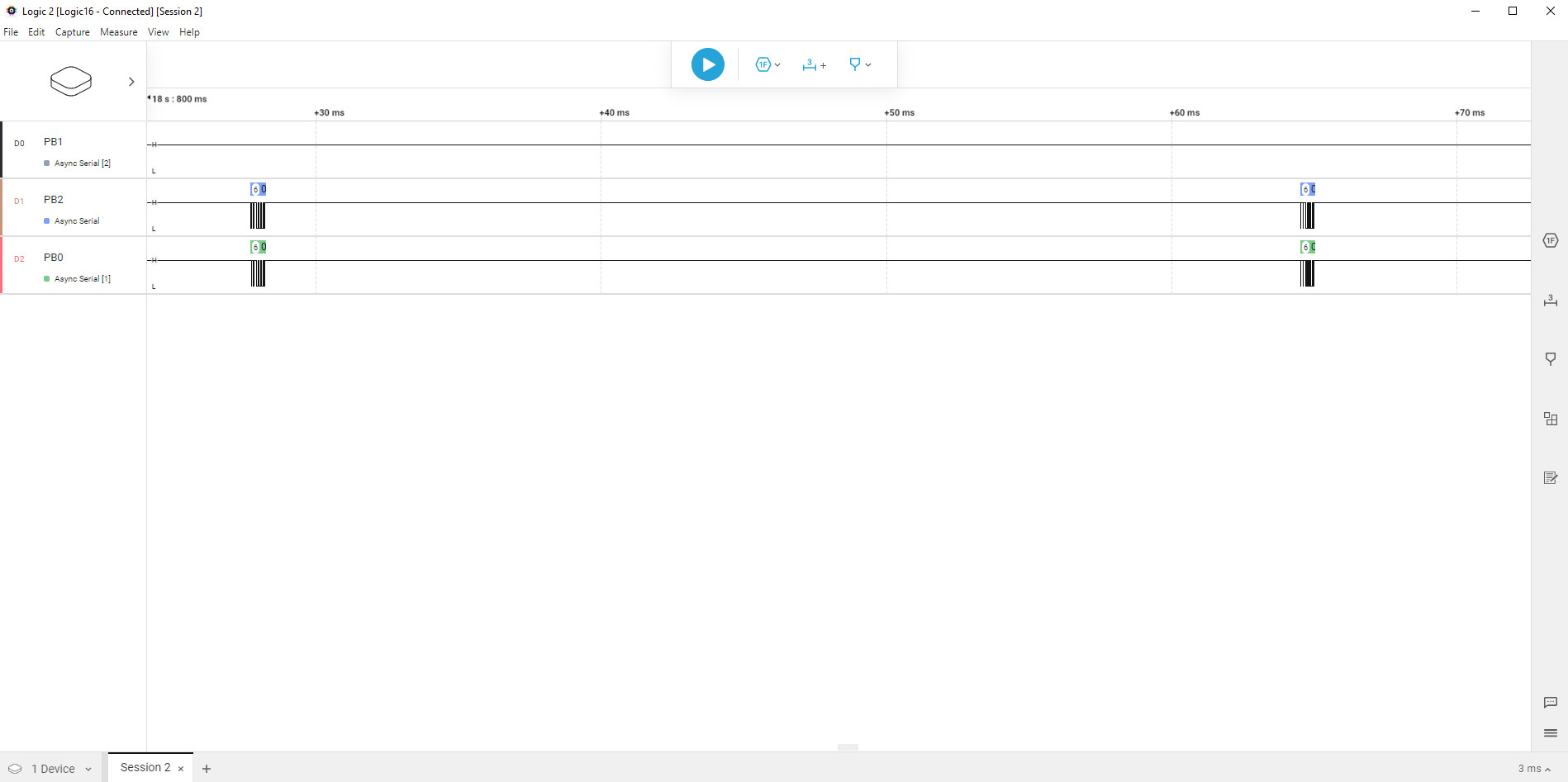
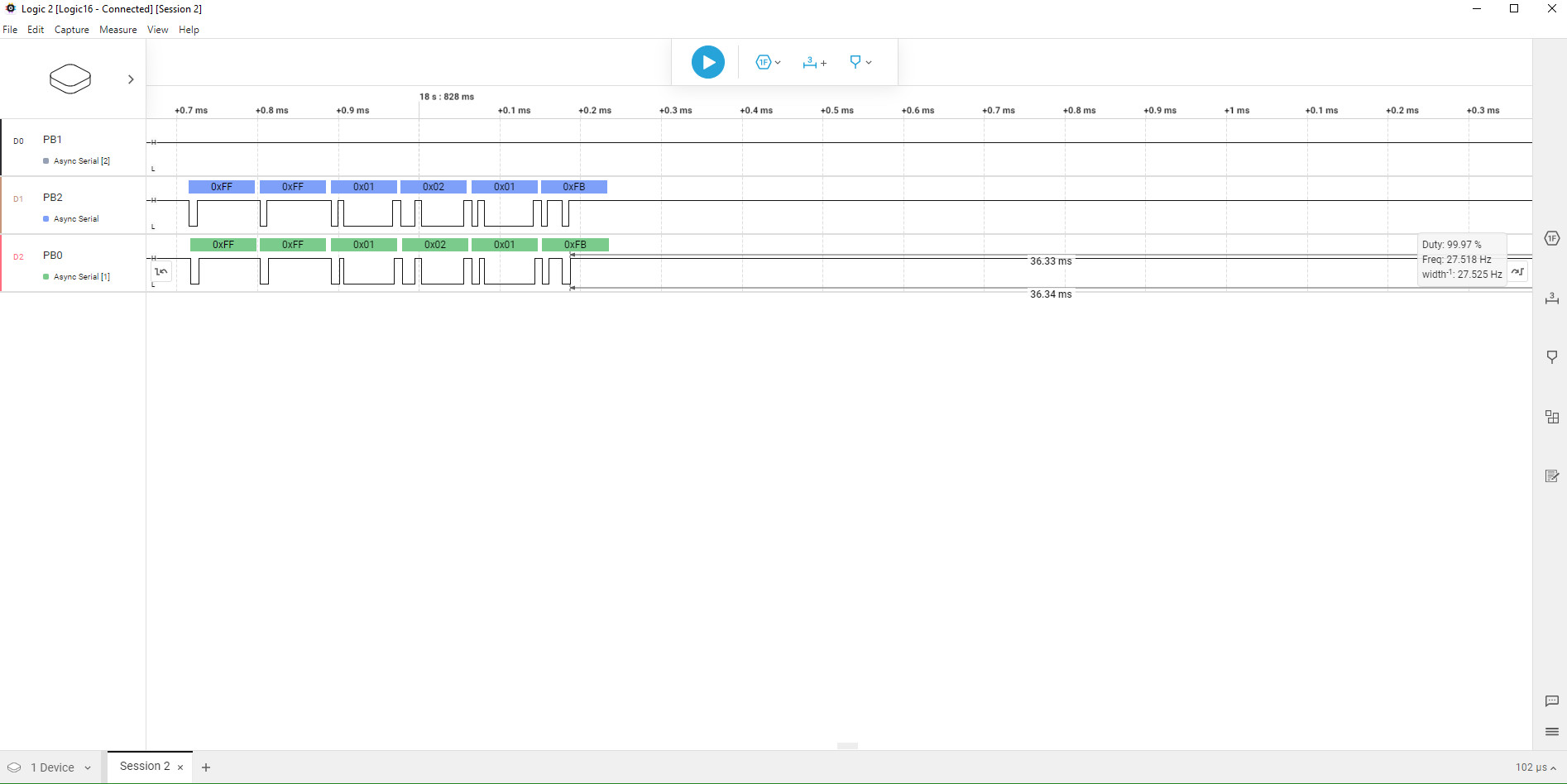
Режим сканера, на разных скоростях
#6 Re: Апаратні питання » K-POWER Цифровой серво-привод DM0900 » 2024-01-07 09:46:16
https://www.youtube.com/watch?v=S0tb3jnfdw4&t=1s тут прекрасно все описано если непонятно и не заработает отпешитесь
На видео сервопривод управляется по ШИМ, а этот по TTL
#7 Апаратні питання » K-POWER Цифровой серво-привод DM0900 » 2024-01-06 16:14:52
- AndDay
- відповідей: 13
Приветствую.
Неделю не могу подружить сервопривод с компом.
Уже и ардуино пробовал, ни как.
Хотя на видео красиво работает
https://youtu.be/_syxCwIINN8?si=Rms5gVFGZDeGqiBT
Есть у кого готовое решение, или хоть наработки ?
Сторінки 1