Ви не увійшли.
- Теми: Активні | Без відповіді
- Форум
- » Проекты
- » Система лазерной швартовки судов
- » Відповісти
Відповісти
Огляд теми (нові повідомленні вгорі)
- GoodZon
- 2018-04-01 02:22:20
Интересно несколько вопросов. А как вы вообще собираетесь получать разрешение на использование вашей системы лазерной швартовки??? Ибо если вдруг случится баг, и после этого швартуемое судно получит повреждения, как будет решаться вопрос. Так же очень интересен бюджет этой разработки, но по моим скромным прикидкам (а я с морем связан как ни кто другой, потому что сам работаю на контейнеровозах) то чтоб разработать такую систему, отладить ее, ввести в эксплуатацию и получить разрешения на использование нужно огромное количество человекоресурсов и времени, и сумма разработки переваливает за цифры с 5 нулями. И это не в гривнах...
Ну а ручные лазерные дальномеры с определением скорости сближения до цели уже давно используются на самих судах в нормальных компаниях. И даже при игре в гольф, когда рассчитывают силу удара и направление с поправкой на ветер. Может этого будет и достаточно.
- Olej
- 2018-03-20 19:26:42
Предварительные исходные данные
1. длина причала до 400 метров
2. длина судна от 100 до 300 метров
3. дальность работы комплекса до 300 метров
Задача хорошая, интересная...
Только, предполагаю, ещё и на 10% не понимаемая самими заказчиками-постановщиками.
Обсуждать, обсуждать, обсуждать ... и уточнять - но это обычная практика в крупных задачах, ничего здесь нет страшного, приложится.
Удивляет (пока, в 1-м приближении): а кто это вам насоветовал ориентироваться на задачу такой сложности, а главное критической надёжности (точнее даже то, что буржуи называют critical mission) делать на игрушках Arduion?
На вскидку предполагаю, что производительности никакого Arduion здесь будет недостаточно ... но дело здесь даже не в производительности, а в архитектурной ограниченности перелопачиванием в loop(), на манер программируемых логических контроллеров (PLC) - в такой архитектуре не все задачи решаются.
Я уже просто не решаюсь говорить о надёжности... ![]()
- Volodya
- 2018-03-20 16:22:36
Volodya пише:Вячеслав Азаров пише:А как вы себе это представляете? Ну, процесс измерений.
с помощью лазерного дальномера, возможно двух
Куда, как, и кто их будет наводить?
В швартовке судна принимает участие не только лоцман и капитан, а еще один или несколько буксиров и докеры, наша задача облегчить работу лоцману и буксирам.
И соответственно "Систему лазерной швартовки судна" (назовем предварительно так наше устройство) на причале развернут "помощники лоцмана" (условно назовем) .
- Volodya
- 2018-03-20 16:02:14
Volodya пише:... Измерения необходимо получать с использованием оборудования установленного на причале. ...
А как вы себе это представляете? Ну, процесс измерений.
с помощью лазерного дальномера, возможно двух
- Volodya
- 2018-03-20 13:24:51
на первом этапе
интересует
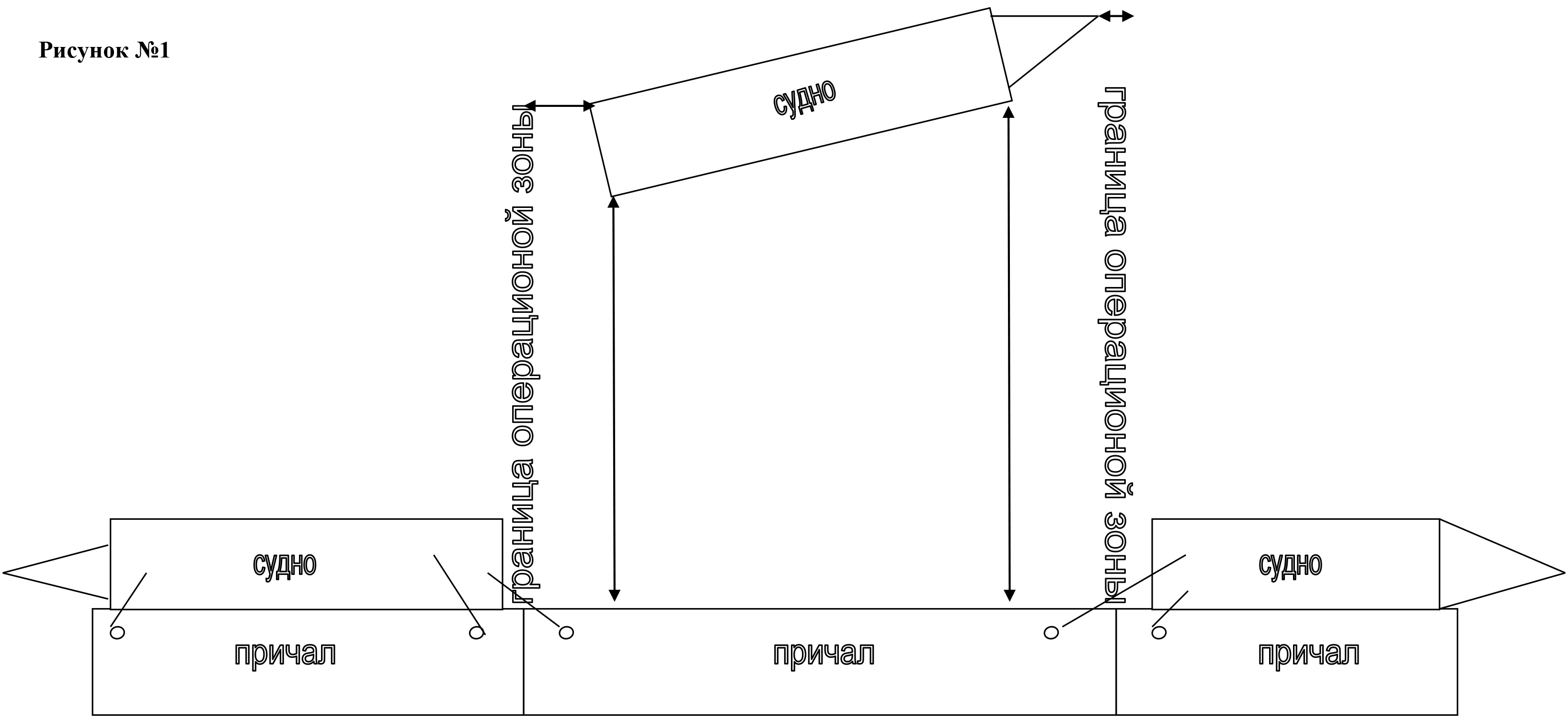
Получение данных о расстоянии оконечностей судна до границ операционной
зоны причала (м) и скорости сближения судна с
причалом (м/с)
Измерения необходимо получать с использованием оборудования
установленного на причале.
Показания необходимо получать на удалении от причала от 300 метров
- Volodya
- 2018-03-20 12:55:42
Предварительные исходные данные
1. длина причала до 400 метров
2. длина судна от 100 до 300 метров
3. дальность работы комплекса до 300 метров
- Olej
- 2018-03-09 11:11:23
Обсуждать можно везде..
Естественно.
И по ходу таких обсуждений может сложиться тех. формулировка задачи ... а не просто хотелки.
Вот тогда можно думать о реализации.
- Batu
- 2018-03-09 07:44:44
Обсуждать можно везде.. А вот задачу надо бы поставить точнее. Скорости-размеры и прочее.. Может не с помощью инфракрасного.. Может сканировать. Может ультразвук.. Сначала постановка задачи, потом метод решения и цена. Пока не понятна постановка задачи
- Olej
- 2018-03-08 22:26:54
Разыскивается разработчик(и) мобильной Системы лазерной швартовки судов
...
Помимо дальности и угла, система рассчитывает скорость сближения или отдаления с пирсом как носа, так и кормы. В случае приближения судна на близкое расстояние с превышением указанных в настройках скорости, сразу сигнализирует об этом через индикацию в интерфейсе.
Любопытная затея...
Только прежде писания ТЗ по таким задачам следовало бы обсудить принципиально, на качественном уровне, "на пальцах": как вы станете корму от носа отличать? как и чем скорости мерять? ... ну и т.д. И только затем, с ясным пониманием, садится писать ТЗ.
P.S. По опыту своего участия во многих и многих программных (и программно-аппаратных) проектах промышленного уровня подозреваю ... на уровне интуитивных оценок (IMHO и ничего больше), что это задача далеко не для таких мощностей как Arduino (не только производительно, но и ... вычислительно, идеологически).
Не тот форум для обсуждения! ![]()
- Batu
- 2018-03-08 09:54:58
Интересно. И мне ТЗ отправьте
- Волшебник
- 2018-03-08 02:58:18
А как с туманом быть?
- Volodya
- 2018-03-05 18:12:00
В ближайшее время выложим ТЗ с этапами и сроками на проектирование и реализацию.
Финансирование согласно заключенного договора
- Volodya
- 2018-03-05 17:30:39
Разыскивается разработчик(и) мобильной Системы лазерной швартовки судов
Основой измерительной Системы лазерной швартовки являются переносные лазерные датчики, которые устанавливаются на причале при проведении швартовных операций. В Систему автоматической швартовки также входит контроллер с несколькими опциями вывода данных.
Данная Система Лазерной Швартовки должна непрерывно вести расчёт дальности до судна дальномером. На основе полученных данных система отрисовывает визуальное положение судна с расчётным углом относительно пирса.
Помимо дальности и угла, система рассчитывает скорость сближения или отдаления с пирсом как носа, так и кормы. В случае приближения судна на близкое расстояние с превышением указанных в настройках скорости, сразу сигнализирует об этом через индикацию в интерфейсе.