Ви не увійшли.
- Теми: Активні | Без відповіді
- Форум
- » Різне
- » Собираю команду робототехников
- » Відповісти
Відповісти
Огляд теми (нові повідомленні вгорі)
- Batu
- 2019-01-29 20:03:00
AlexT пише:Моя тема актуальна! Кто знаком с позиционированием объектов в пространстве, не используя GPS ?
Есть ещё ГЛОНАСС. А по сути, все системы обнаружения координат одинаковы, поскольку в основе лежит решение триангулярной задачи. Даже комнатные. Различия только в методах измерения расстояний.
Есть небольшая разница. Учет скоростей спутника и расстояний. От того предусмотрены поправки.
- Костянтин
- 2019-01-29 14:14:00
Я пока сам разрабатываю роботов. Я автор книг 10 практических примеров на AVR контроллерах. Разрабатываю простые схемы на AVR с 2009 г.
Здравствуйте! Видел пример из оргстекла. Если купили - успех конечно(значит признали) !!!! Какое есть еще техническое применение того, что Вы разработали? Сам только начал осваивать эту тематику и Ардуино тоже (вот только купил и собираю алюминевого китайского 6-осевого робота), а уже 15 лет автоматические промышленные устройства делаю (механику).
- Вячеслав Азаров
- 2019-01-29 08:22:49
Моя тема актуальна! Кто знаком с позиционированием объектов в пространстве, не используя GPS ?
Есть ещё ГЛОНАСС. А по сути, все системы обнаружения координат одинаковы, поскольку в основе лежит решение триангулярной задачи. Даже комнатные. Различия только в методах измерения расстояний.
- AlexT
- 2019-01-29 00:10:24
Моя тема актуальна! Кто знаком с позиционированием объектов в пространстве, не используя GPS ?
- Костянтин
- 2019-01-22 18:03:53
Всем здравствуйте! Насколько сбор команды еще актуален?
- Dmitriy
- 2015-06-17 17:47:04
Так определились с местом тусовки?) С удовольствием присоединюсь. Есть нейроинтерфейс для управления роботом силой мысли;)
- volodymyr
- 2015-02-05 22:55:23
Отлично!
Стучусь вконтакте.
- Dench
- 2015-02-05 22:28:34
Ого, крутой датчик. Несколько раз видел тему на форуме, но почему-то, моё сознание не понимало о чем идёт речь) обязательно нужно потестить. Если это возможно, то я бы взял его, посмотрел.
Как с вами можно связаться?
Если что, я в ВК vk.com/dench
- volodymyr
- 2015-02-05 21:02:13
Привет, коллеги!
Если кому интересно потестировать оптический датчик перемещения (OpticalFlow sensor), могу дать (Киев).
Здесь я писал
http://forum.arduino.ua/viewtopic.php?id=93
и мне посоветовали спросить в этой группе разработчиков-робототехников.
Мне нужно с ним поработать, а самостоятельно не смог наладить коннект по SPI.
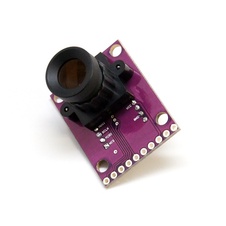 Сам датчик может быть довольно интересен в робототехнике.
Сам датчик может быть довольно интересен в робототехнике.
30х30 пикселей изображение можно напрямую получить в Aduino с большой скоростью кадров. Можно данные предавать на "Большой" компьютер (Есть готовый пример на python)
Отслеживать перемещение над поверхностью, определять предметы в пространстве, перемещения, и разные события.
Можно использовать как фасеточный глаз у насекомых. Имеем 900 фасеток. Это больше чем у муравья (100) и меньше, чему у мухи (4000).
Зато скорость на порядок выше: от 2000 до 6400 кадров в секунду, в зависимости от разрешения против 200-300 у мухи.
- Dench
- 2015-02-05 17:42:27
- Dench
- 2015-02-03 01:42:21
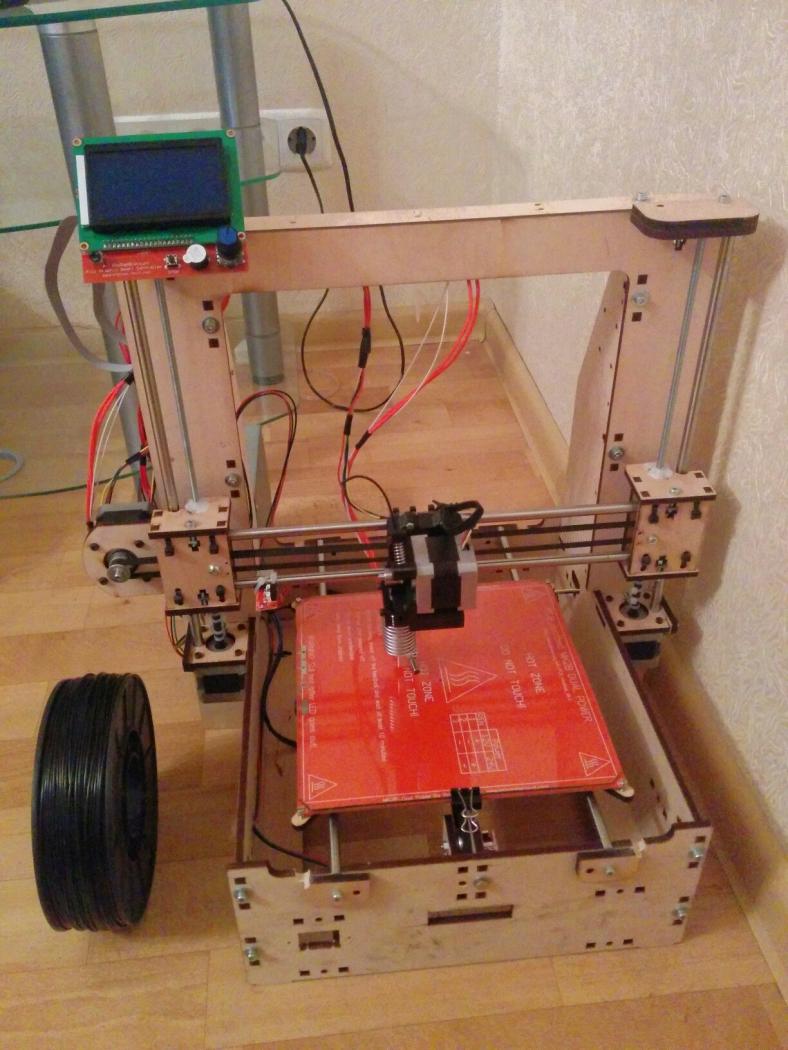
Уже в сборе) правда я забыл купить термистор для платформы, теперь мучаюсь, потому что без него не могу начать печать.
- tatkov
- 2015-01-29 15:13:24
выложите хоть фото для затравки
- Dench
- 2015-01-29 12:07:39
Уже собрал принтер. На выходных буду калибровать и может смогу что-то напечатать.
И написал уже пол статьи первой части) На следующей неделе выложу мои мучения)
Сложновато оказалось)
А насчет робототехники, после принтера создам статью на форуме "Проект №1". А там посмотрим, как дела пойдут.
- tatkov
- 2015-01-29 02:48:53
Ну как там ваш проект поживает?
- admin
- 2015-01-12 19:38:53
Как успехи? Выложите хоть фото сборки для затравки, следим за темой с интересом.