Ви не увійшли.
- Теми: Активні | Без відповіді
#1 Re: Проекти » Необходимо написать скетч под ESP8266 счетчик лайков и просмотров » 2021-01-10 01:36:00
Вот ссылка на алекса дальше сами с усами https://www.youtube.com/watch?v=oVBnyr9lpOk&t=245s
#2 Re: Програмування Arduino » Хто допоможе переробить прошивку на тахометр » 2020-12-11 23:50:38
Mishka пише:renoshnik пише:Не лучший ресурс вы выбрали .... :-)
Вы имеете ввиду alexgyver.ru или forum.arduino.ua?
Естественно alexgyver.ru ...
А чем вам уже гавер не понравился? он ведь иногда очень интересные вещи делает. Да есть ошибки в схемотехнике но ведь никто из нас не идеален). Просто хочу услышать вашу точку зрения на счёт этого человека.
#3 Re: Програмування Arduino » Проблема с машинкой... » 2020-11-29 17:15:46
Всем доброго времени суток! Я новичок в ардуино и на форуме так что извиняюсь если написал не в тот раздел. Так вот я заказал набор ардуино уно с машинкой объезжающая препятствия на драйвере L298n 4 колёсах и ультразвуковом датчике HC-SR04 и когда я загружаю загружаю код из инструкции ошибок не выдаёт но сама машинка не едет. Незнаю что такое и прошу помочь. Буду очень благодарен.
Вот код из инструкции:int inputPin=A0; // ultrasonic module ECHO to A0 int outputPin=A1; // ultrasonic module TRIG to A1 #define Lpwm_pin 5 //pin of controlling speed---- ENA of motor driver board #define Rpwm_pin 10 //pin of controlling speed---- ENB of motor driver board int pinLB=2; //pin of controlling turning---- IN1 of motor driver board int pinLF=4; //pin of controlling turning---- IN2 of motor driver board int pinRB=7; //pin of controlling turning---- IN3 of motor driver board int pinRF=8; //pin of controlling turning---- IN4 of motor driver board unsigned char Lpwm_val = 200; //initialized left wheel speed at 250 unsigned char Rpwm_val = 200; //initialized right wheel speed at 250 int Car_state=0; //the working state of car int servopin=3; //defining digital port pin 3, connecting to signal line of servo motor int myangle; //defining variable of angle int pulsewidth; //defining variable of pulse width unsigned char DuoJiao=60; //initialized angle of motor at 60° void servopulse(int servopin,int myangle) //defining a function of pulse { pulsewidth=(myangle*11)+500; //converting angle into pulse width value at 500-2480 digitalWrite(servopin,HIGH); //increasing the level of motor interface to upmost delayMicroseconds(pulsewidth); //delaying microsecond of pulse width value digitalWrite(servopin,LOW); //decreasing the level of motor interface to the least delay(20-pulsewidth/1000); } void Set_servopulse(int set_val) { for(int i=0;i<=10;i++) //giving motor enough time to turn to assigning point servopulse(servopin,set_val); //invokimg pulse function } void M_Control_IO_config(void) { pinMode(pinLB,OUTPUT); // /pin 2 pinMode(pinLF,OUTPUT); // pin 4 pinMode(pinRB,OUTPUT); // pin 7 pinMode(pinRF,OUTPUT); // pin 8 pinMode(Lpwm_pin,OUTPUT); // pin 11 (PWM) pinMode(Rpwm_pin,OUTPUT); // pin10(PWM) } void Set_Speed(unsigned char Left,unsigned char Right) //function of setting speed { analogWrite(Lpwm_pin,Left); analogWrite(Rpwm_pin,Right); } void advance() // going forward { digitalWrite(pinRB,LOW); // making motor move towards right rear digitalWrite(pinRF,HIGH); digitalWrite(pinLB,LOW); // making motor move towards left rear digitalWrite(pinLF,HIGH); Car_state = 1; } void turnR() //turning right(dual wheel) { digitalWrite(pinRB,LOW); //making motor move towards right rear digitalWrite(pinRF,HIGH); digitalWrite(pinLB,HIGH); digitalWrite(pinLF,LOW); //making motor move towards left front Car_state = 4; } void turnL() //turning left(dual wheel) { digitalWrite(pinRB,HIGH); digitalWrite(pinRF,LOW ); //making motor move towards right front digitalWrite(pinLB,LOW); //making motor move towards left rear digitalWrite(pinLF,HIGH); Car_state = 3; } void stopp() //stop { digitalWrite(pinRB,HIGH); digitalWrite(pinRF,HIGH); digitalWrite(pinLB,HIGH); digitalWrite(pinLF,HIGH); Car_state = 5; } void back() //back up { digitalWrite(pinRB,HIGH); //making motor move towards right rear digitalWrite(pinRF,LOW); digitalWrite(pinLB,HIGH); //making motor move towards left rear digitalWrite(pinLF,LOW); Car_state = 2; } void Self_Control(void)//self-going, ultrasonic obstacle avoidance { int H; Set_servopulse(DuoJiao); H = Ultrasonic_Ranging(1); delay(300); if(Ultrasonic_Ranging(1) < 35) { stopp(); delay(100); back(); delay(50); } if(Ultrasonic_Ranging(1) < 60) { stopp(); delay(100); Set_servopulse(5); int L = ask_pin_L(2); delay(300); Set_servopulse(177); int R = ask_pin_R(3); delay(300); if(ask_pin_L(2) > ask_pin_R(3)) { back(); delay(100); turnL(); delay(400); stopp(); delay(50); Set_servopulse(DuoJiao); H = Ultrasonic_Ranging(1); delay(500); } if(ask_pin_L(2) <= ask_pin_R(3)) { back(); delay(100); turnR(); delay(400); stopp(); delay(50); Set_servopulse(DuoJiao); H = Ultrasonic_Ranging(1); delay(300); } if (ask_pin_L(2) < 35 && ask_pin_R(3)< 35) { stopp(); delay(50); back(); delay(50); } } else { advance(); } } int Ultrasonic_Ranging(unsigned char Mode)//function of ultrasonic distance detecting ,MODE=1,displaying,no displaying under other situation { int old_distance; digitalWrite(outputPin, LOW); delayMicroseconds(2); digitalWrite(outputPin, HIGH); delayMicroseconds(10); digitalWrite(outputPin, LOW); int distance = pulseIn(inputPin, HIGH); // reading the duration of high level distance= distance/58; // Transform pulse time to distance if(Mode==1){ Serial.print("\n H = "); Serial.print(distance,DEC); return distance; } else return distance; } int ask_pin_L(unsigned char Mode) { int old_Ldistance; digitalWrite(outputPin, LOW); delayMicroseconds(2); digitalWrite(outputPin, HIGH); delayMicroseconds(10); digitalWrite(outputPin, LOW); int Ldistance = pulseIn(inputPin, HIGH); Ldistance= Ldistance/58; // Transform pulse time to distance if(Mode==2){ Serial.print("\n L = "); Serial.print(Ldistance,DEC); return Ldistance; } else return Ldistance; } int ask_pin_R(unsigned char Mode) { int old_Rdistance; digitalWrite(outputPin, LOW); delayMicroseconds(2); digitalWrite(outputPin, HIGH); // delayMicroseconds(10); digitalWrite(outputPin, LOW); int Rdistance = pulseIn(inputPin, HIGH); Rdistance= Rdistance/58; // Transform pulse time to distance if(Mode==3){ Serial.print("\n R = "); Serial.print(Rdistance,DEC); return Rdistance; } else return Rdistance; } void setup() { pinMode(servopin,OUTPUT); //setting motor interface as output M_Control_IO_config(); //motor controlling the initialization of IO Set_Speed(Lpwm_val,Rpwm_val); //setting initialized speed Set_servopulse(DuoJiao); //setting initialized motor angle pinMode(inputPin, INPUT); //starting receiving IR remote control signal pinMode(outputPin, OUTPUT); //IO of ultrasonic module Serial.begin(9600); //initialized serial port , using Bluetooth as serial port, setting baud stopp(); //stop } void loop() { Self_Control(); }Если понадобится диаграмма подключения прошу написать.
Её стоило сразу писать.
#4 Re: Апаратні питання » Посоветуйте как подключить sonoff » 2020-11-25 23:51:08
Нет ))) 39 ом 3 вт на форуме реддита нашёл.
Вот : https://www.reddit.com/r/AskElectronics/comments/enh01v/what_is_this_390_resistor_look_alike_that_got/
#5 Re: Апаратні питання » Посоветуйте как подключить sonoff » 2020-11-25 23:26:41
Carabas212 пише:меня закидают какахами и обзовут дилетантом
Какаха первая - ТС под "померять" имел ввиду что может у кого-то есть такая же приблуда и этот кто-то от нечего делать полезет вскрывать коробайку и мерять номинал этого резистора
Вполне может быть, хотя я все же думаю что он на 1 ом.
#6 Re: Програмування Arduino » Помогите с кодом автоматического включения/отключения бойлера » 2020-11-25 22:51:37
Для экономии энергии и времени можно вспомнить про проточный нагреватель
Какая экономия? Кпд проточного водонагревателя 70% а бойлера 90%(я имею в виду накопительного). так что не будет тут никакой экономии ![]()
#7 Re: Проекти » Барограф / барометр / термометр / bmp180 / nokia 5110 / 3V3 / pro mini » 2020-11-25 22:46:16
Либо плата защиты аккума либо тп4056 с защитой. Но будьте осторожны с тп4056 и платами защиты бывает брак нужно мерять потребление.
#8 Re: Апаратні питання » Посоветуйте как подключить sonoff » 2020-11-25 22:39:15
http://forum.arduino.ua/img/members/2996/sonoff-mini-flash.jpg
привіт, може хтось допомогти з визначенням номінала резистора, згорів і не видно колір полос, дивився по фото в неті, думаю 1 Ом або 10 Ом. Хтось може поміряти. Дякую.
Скорее всего он на 1 ом по схемотехнике я вижу что он стоит рядом с варистором и выполняет работу предохранителя, а вот если он уже сгорел то это повод задуматься почему... ах да ПОМЕРЯТЬ сгоревший резистор невозможно, это так на заметку. Точнее можно (ибо если я не скажу это то меня закидают какахами и обзовут дилетантом) но его сопротивление будет очень отличатся от первоначальной либо он будет в обрыве.
#9 Re: Апаратні питання » Подключение мотора » 2020-11-25 22:29:29
Не понятен вопрос, поясни. В каком смысле
Lesaje пише:как на практике реализовать подключение кабеля 12 вольт к драйверу?
В чём проблема-то?
Скорее всего человек не бум-бум в электронике. И видит ее первый раз в жизни. У меня такой случай был, человек хотел на ардуино организовать включение света по движению и выключение его же после 2-х минут, И он реально хотел ПЛАТИТЬ ДЕНЬГИ ЗА ЭТО. Я этим не занялся только потому что уезжал, а так это целая история которая кончилась ничем.
#10 Re: Апаратні питання » Подключение мотора » 2020-11-23 22:58:34
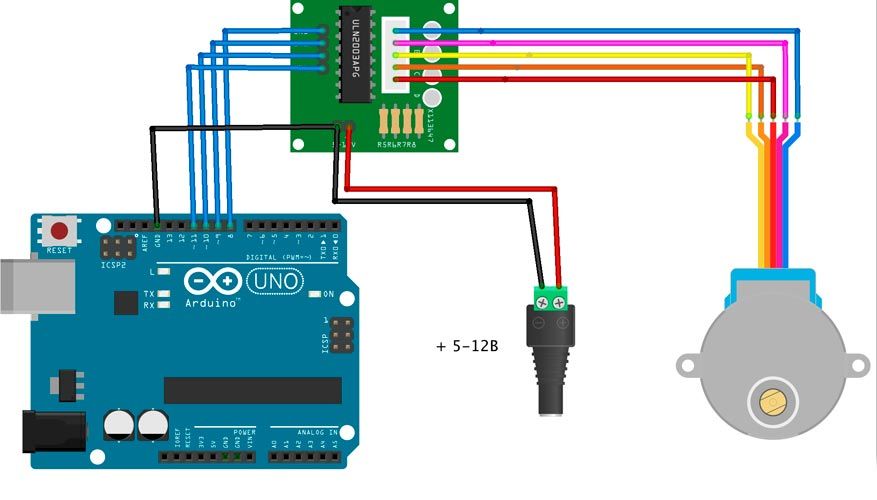
Как по мне стандартная схема включения.
#11 Re: Програмування Arduino » Помогите с кодом автоматического включения/отключения бойлера » 2020-11-21 13:08:48
Если уж наш друг хочет чтобы мы ему помогли то ему стоит вспомнить школьные уроки информатики и нарисовать алгоритм работы какой ему нужен, а то чую это гадание на кофейной гуще будет идти долго... В любом случае нашему другу стоит ХОТЯБЫ читать эту тему, а то создал её и сразу забросил ![]() .
.
#12 Re: Програмування Arduino » Помогите с кодом автоматического включения/отключения бойлера » 2020-11-16 23:46:03
Скорее всего через датчик течения. Но можно и через термо-реле так даже задача упрощается.
даже можно обойтись и без ардуино чисто на термо-реле и трансформаторах тока и реле
#13 Re: Апаратні питання » Сервопривод sg90 » 2020-07-26 01:01:25
я его проверял
#14 Re: Апаратні питання » Сервопривод sg90 » 2020-07-25 22:36:12
Прям так кардинально?
И только это? ![]()
#15 Апаратні питання » Сервопривод sg90 » 2020-07-25 20:53:04
- Carabas212
- відповідей: 5
при выполнении скетча :
#include <Servo.h>
Servo myservo;
void setup()
{
myservo.attach(9);
}
void loop()
{
myservo.write(0);
delay(1000);
myservo.write(180);
delay(1000);
}
серва крутится только в 0-е положение. Если покрутить вал сервопривода он вернётся в 0-е положение. Подскажите что делать?
#16 Re: Програмування Arduino » Программа: LED панель, ардуино мега 2560 r3, блютуз. » 2020-07-22 22:42:51
Зачем только там? Здесь на форуме есть не мало желающих подзаработать, поищите по форуму Проекты>Список исполнителей. Там уж вы точно найдёте нужного вам кодера ![]() .
.
#17 Re: Програмування Arduino » помогите новичку » 2020-07-20 22:20:14
И где именно? И тем более я не говорил что я являюсь каким либо профи в этом деле. Я просто решил помочь тем чем могу. И да я вас перепутал с создателе данного поста(извиняюсь).
#18 Re: Програмування Arduino » помогите новичку » 2020-07-20 22:10:18
Я имею в виду что саму палату они могли и сами сделать а чип закупить у какого либо стороннего производителя.
Так загрузчик записан или нет?
#19 Re: Програмування Arduino » помогите новичку » 2020-07-20 22:04:24
Что именно?
#20 Re: Програмування Arduino » помогите новичку » 2020-07-20 22:00:09
Китайцы могли тебе поставить атмегу в корпусе DIP. Они у них там кучами лежат. И обычно в них загрузчика нет.
#21 Re: Програмування Arduino » помогите новичку » 2020-07-20 21:39:58
Давай начнём от крайнего. Какой у тебя чип на уно, формата DIP-28 или Tqfp-32? И если плата китайская попробуй записать загрузчик в неё.
#22 Re: Програмування Arduino » Проблемы с компилятором wavgat pro mini и BMP280 » 2020-07-18 15:59:06
У меня уже нет этой проблемы как я описал выше тем более что это все часть проекта для предсказателя погоды тем более что ко мне едет нормальная ардуинка.
#23 Re: Програмування Arduino » Программа: LED панель, ардуино мега 2560 r3, блютуз. » 2020-07-18 15:28:10
Залезь на сайт AlexGyver там есть что-то подобное но только на адресной ленте.
#24 Re: Програмування Arduino » Проблемы с компилятором wavgat pro mini и BMP280 » 2020-07-18 14:52:53
Не уверен. у меня нет осциллографа для проверки(хотя задумываюсь над его покупкой) если вы хотите я могу отослать фотографию платы вам на почту. Насчёт программы Blink - там точно нет 1 секунды (Только что посчитал там около 3,98 с )
#25 Re: Програмування Arduino » Проблемы с компилятором wavgat pro mini и BMP280 » 2020-07-17 22:08:32
Каким образом и как это повлияет на сам микроконтроллер мы ведь не заставляем его что-нибудь рисовать и т.д. ? Тогда как его переключить на 32мг?
добавлено - только ша с увидел что у кварца Слишком много выводов (около 6).